
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Hey there, I did something related. At the end I used VNC to connect to the docker image and run the gui for Gazebo and Rviz. If you have a decent computer it should run better than with VMs. Check this repo where I detail the install process and the docker image.
At the end it looked like this:
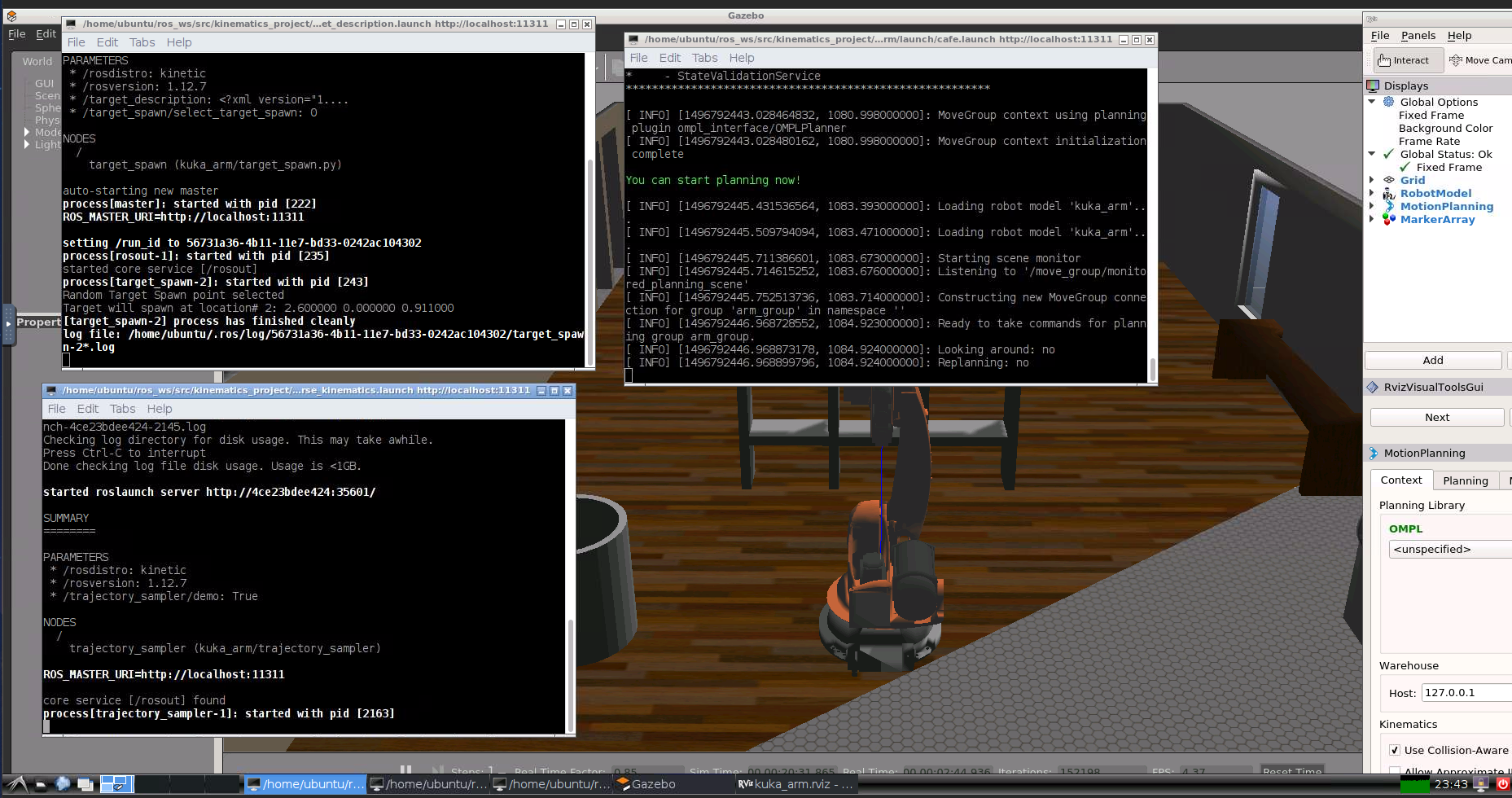
And all of it was running in a docker image. Hope it helps!
(btw there is some extra things you might not need like the workspace I used, that was for a Udacity Assignment)
| | 2 | No.2 Revision |
Hey there, I did something related. At the end I used VNC to connect to the docker image and run the gui for Gazebo and Rviz. If you have a decent computer it should run better than with VMs. Check this repo where I detail the install process and the docker image.
At the end it looked like this:
And all of it was running in a docker image. Hope it helps!
(btw there is some extra things you might not need like the workspace I used, that was for a Udacity Assignment)
EDIT: Indeed, for performance you can check the GUI Docker guide from ROS. Connecting to the X11 is the recommended case, especially since you are on Ubuntu 18 already. I did this VNC solution so I can connect from Windows or Mac for example.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
