
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Hi there, the control input U is the action that you input to the system. If you have a linearized equation of your system then the state space representation of it would be something like:
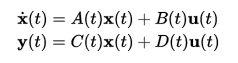
In that case, u(t) is the input to your system. So if you have a car, it'll be the motor's speed. You can read more about state space here: https://en.wikipedia.org/wiki/State-space_representation
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
