
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
O wait. I missed this part:
sometimes the path is very long and I want to see only a specific part
If it's really just about visualisation -- instead of execution, as I initially understood your question: that has actually recently been added. See ros-planning/moveit#491.
| | 2 | No.2 Revision |
O wait. I missed this part:
sometimes the path is very long and I want to see only a specific part
If it's really just about visualisation -- instead of execution, as I initially understood your question: that has actually recently been added. See ros-planning/moveit#491.
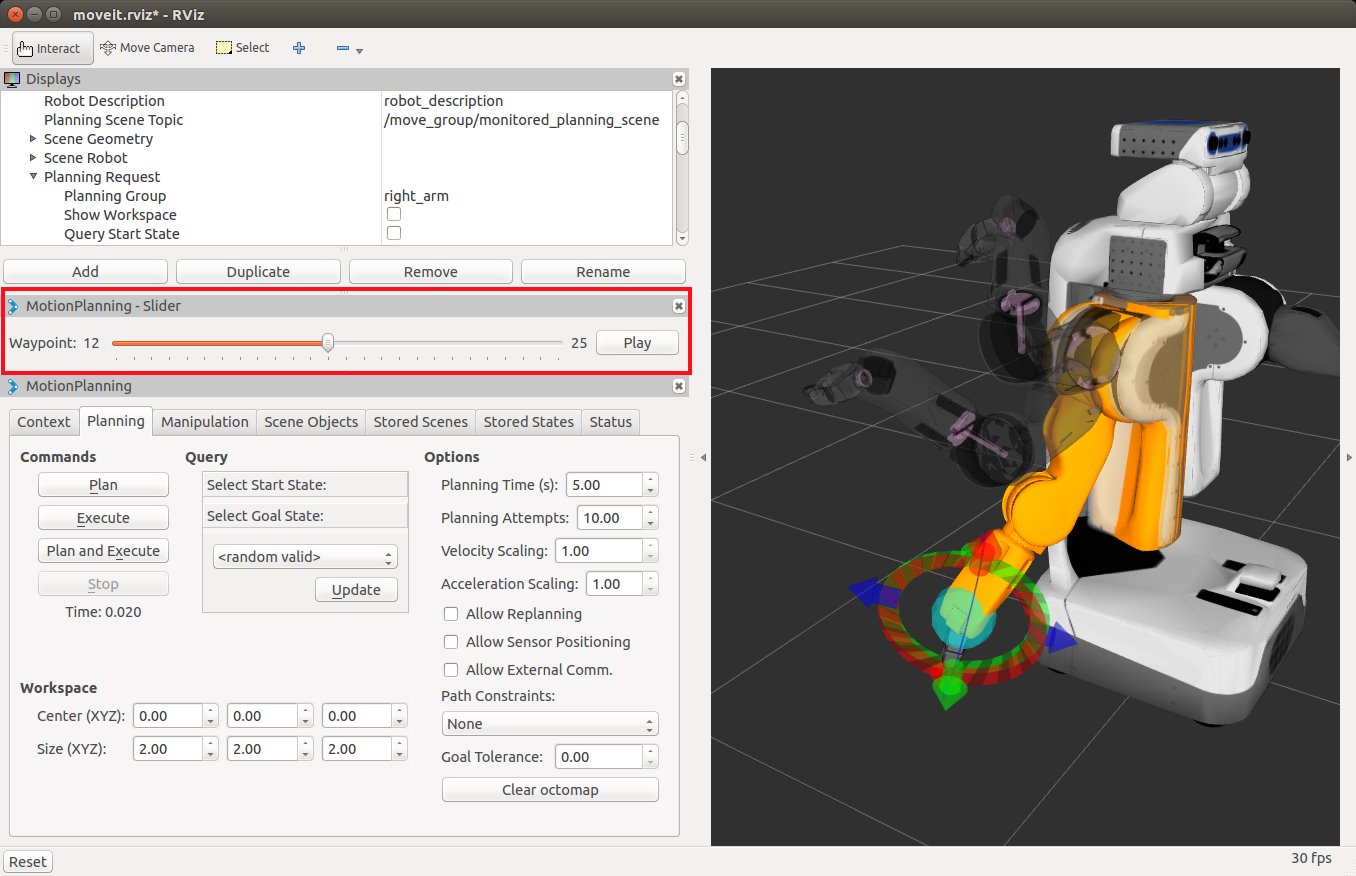
The updated MoveIt! RViz Plugin Tutorial tutorial shows what this looks like now (in Introspecting trajectory waypoints):

| | 3 | No.3 Revision |
O wait. I missed this part:
sometimes the path is very long and I want to see only a specific part
If it's really just about visualisation -- instead of execution, as I initially understood your question: that has actually recently been added. See ros-planning/moveit#491.
The updated MoveIt! RViz Plugin Tutorial tutorial shows what this looks like now (in Introspecting trajectory waypoints):
| | 4 | No.4 Revision |
O wait. I missed this part:
sometimes the path is very long and I want to see only a specific part
If it's really just about visualisation -- instead of execution, as I initially understood your question: that has actually recently been added. See ros-planning/moveit#491.
The updated MoveIt! RViz Plugin Tutorial tutorial shows what this looks like now (in Introspecting trajectory waypoints):
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
