
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I'm late to the party again, but if anyone else is unsure what IP address the HDL/VLP is, you have two methods:
View the source IP in WireShark: Download WireShark, plug your device into your computer via Ethernet cable and watch the LAN connection. Velodyne LiDAR devices output their data as UDP packets and you can see them over the LAN connection regardless of the network settings of your computer. The UDP packets are usually so numerous that they flood the display, like this:
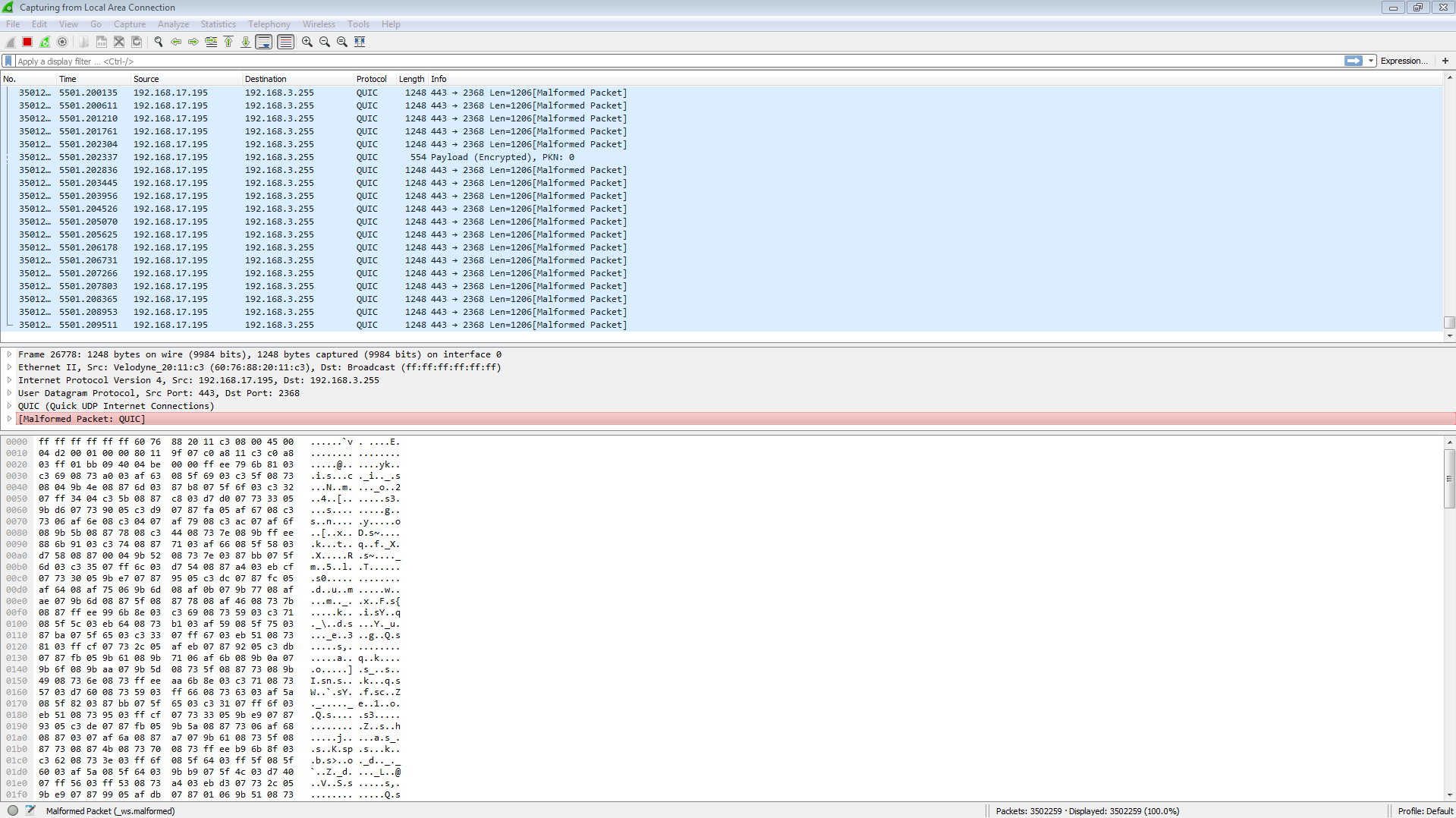
Notice that each packet has a "source" and a "destination" IP address. The source IP is the current IP address of your LiDAR unit, and that's the address you want. The destination IP is fixed and will be the same for every device, just ignore it.
Once you have the source IP of the device you should be able to follow the instructions on the Velodyne drivers page here.
| | 2 | No.2 Revision |
I'm late to the party again, but if anyone else is unsure what IP address the HDL/VLP is, you have two methods:
View the source IP in WireShark: Download WireShark, plug your device into your computer via Ethernet cable and watch the LAN connection. Velodyne LiDAR devices output their data as UDP packets and you can see them over the LAN connection regardless of the network settings of your computer. The UDP packets are usually so numerous that they flood the display, like this:
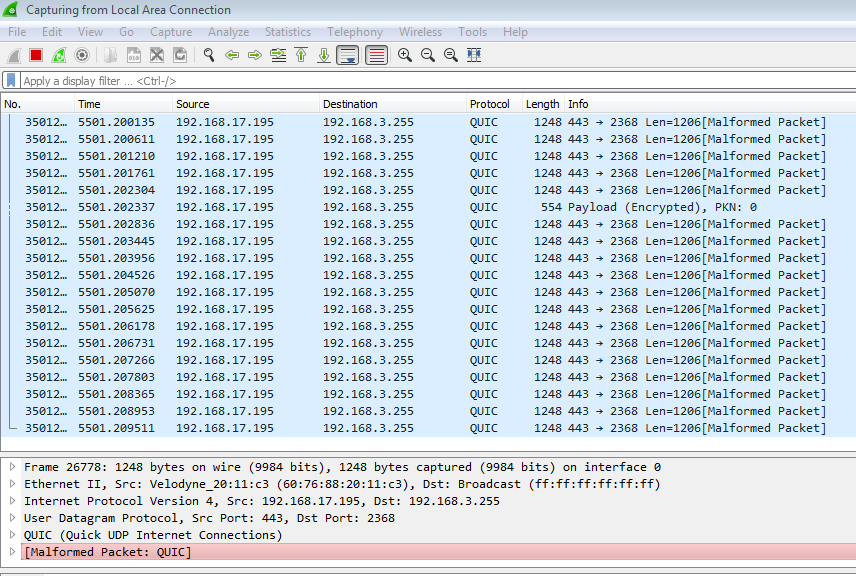
Notice that each packet has a "source" and a "destination" IP address. The source IP is the current IP address of your LiDAR unit, and that's the address you want. The destination IP is fixed and will be the same for every device, just ignore it.
Once you have the source IP of the device you should be able to follow the instructions on the Velodyne drivers page here.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
