
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
You can go to the directory where view_demo.launch belongs and run roslaunch view_demo.launch directly.
If you want to run roslaunch mastering_ros_robot_description_pkg view_demo.launch, you need to do catkin_make first.
| | 2 | No.2 Revision |
You can go to the directory where view_demo.launch belongs and run roslaunch view_demo.launch directly.
If you want to run roslaunch mastering_ros_robot_description_pkg view_demo.launch, you need to do catkin_make first.
Your edit1 is confusing, I don't know what is going on, but let me answer your 3rd question.
.rviz and .vcg file are both RViz configuration file, but since ROS Groovy the configuration file format has changed, from .vcg to .rviz. For detail, you can see RViz User Guide - configurations.
| | 3 | No.3 Revision |
You can go to the directory where view_demo.launch belongs and run roslaunch view_demo.launch directly.
If you want to run roslaunch mastering_ros_robot_description_pkg view_demo.launch, you need to do catkin_make first.
Your edit1 is confusing, I don't know what is going on, but let me answer your 3rd question.
.rviz and .vcg file are both RViz configuration file, but since ROS Groovy the configuration file format has changed, from .vcg to .rviz. For detail, you can see RViz User Guide - configurations.
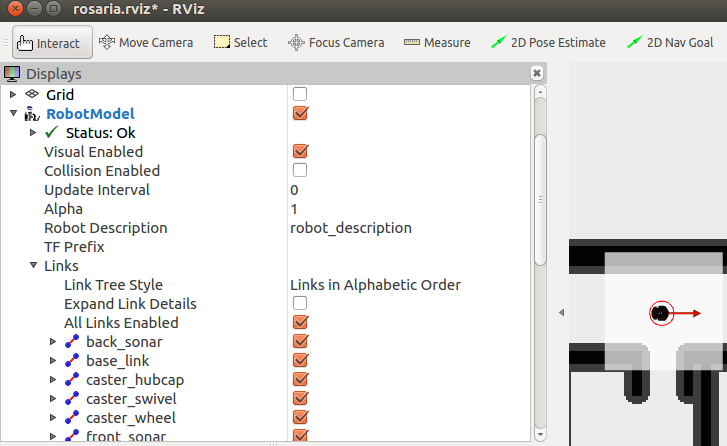
To display the robot URDF, you need to add a RobotModel in RViz. Like this:
| | 4 | No.4 Revision |
You can go to the directory where view_demo.launch belongs and run roslaunch view_demo.launch directly.
If you want to run roslaunch mastering_ros_robot_description_pkg view_demo.launch, you need to do catkin_make first.
Your edit1 is confusing, I don't know what is going on, but let me answer your 3rd question.
.rviz and .vcg file are both RViz configuration file, but since ROS Groovy the configuration file format has changed, from .vcg to .rviz. For detail, you can see RViz User Guide - configurations.
To display the robot URDF, you need to add a RobotModel in RViz. Like this:
urdf.rviz is just a configuration file for your RViz, when you open the RViz with urdf.rviz, and add or remove some items in the Displays, and save config, then your urdf.rviz will be modified. Next time you open RViz with urdf.rviz, the configuration will be same as what you had saved.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
