
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Ok so I try to answer your questions. I dont have very good english so I hope you will understand.
1 When you load your urdf on a parameter server and then you run robot state publisher. It could create transformations for your robot. You dont need to create broadcaster. Robot state publisher will take as a parameter your robot_description and use it for creating transforms
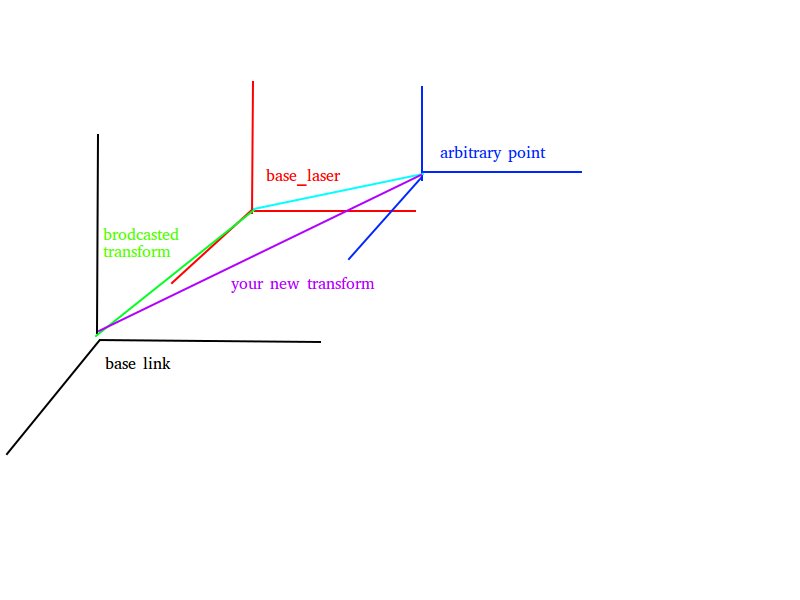
2 This tutorial has nothing to do with mapping. It just shows and explains trasnformations. In the first part you create broadcaster which broadcasts transformation between base_laser and base_link. Then you choose arbitrary point in coordinate system of base_laser and transform it to coordinate system of base_link. And thats all, transformation represents orientation and translation in space.
 For better understanding I recommended you to watch this video https://www.youtube.com/watch?v=rTN4nawkrZs . Transformation is global concept used everywhere in robotics graphics and so on not just in ROS.
For better understanding I recommended you to watch this video https://www.youtube.com/watch?v=rTN4nawkrZs . Transformation is global concept used everywhere in robotics graphics and so on not just in ROS.
3 I dont know if you understand the issue but this topic http://docs.ros.org/api/sensor_msgs/html/msg/LaserScan.html represent and defines a data from laser scan. TF is just used to locate laser_base in space relative to the robot_base.
Last thing. Feel free to ask I am beginner too and I also don't understand everything. Year before when I began with ros I had same questions as you. I know my explanation is also not the best but I hope it helps.
| | 2 | No.2 Revision |
Ok so I try to answer your questions. I dont have very good english so I hope you will understand.
1 When you load your urdf on a parameter server and then you run robot state publisher. It could create transformations for your robot. You dont need to create broadcaster. Robot state publisher will take as a parameter your robot_description and use it for creating transformstransformatins
2 This tutorial has nothing to do with mapping. It just shows and explains trasnformations. In the first part you create broadcaster which broadcasts transformation between base_laser and base_link. Then you choose arbitrary point in coordinate system of base_laser and transform it to coordinate system of base_link. And thats all, transformation represents orientation and translation in space.
For better understanding I recommended you to watch this video https://www.youtube.com/watch?v=rTN4nawkrZs . Transformation is global concept used everywhere in robotics graphics and so on not just in ROS.
3 I dont know if you understand the issue but this topic http://docs.ros.org/api/sensor_msgs/html/msg/LaserScan.html represent and defines a data from laser scan. TF is just used to locate laser_base in space relative to the robot_base.
Last thing. Feel free to ask I am beginner too and I also don't understand everything. Year before when I began with ros I had same questions as you. I know my explanation is also not the best but I hope it helps.
| | 3 | No.3 Revision |
Ok so I try to answer your questions. I dont have very good english so I hope you will understand.
1 When you load your urdf on a parameter server and then you run robot state publisher. It could create transformations for your robot. You dont need to create broadcaster. Robot state publisher will take as a parameter your robot_description and use it for creating transformatinstransformations
2 This tutorial has nothing to do with mapping. It just shows and explains trasnformations. In the first part you create broadcaster which broadcasts transformation between base_laser and base_link. Then you choose arbitrary point in coordinate system of base_laser and transform it to coordinate system of base_link. And thats all, transformation represents orientation and translation in space.
For better understanding I recommended you to watch this video https://www.youtube.com/watch?v=rTN4nawkrZs . Transformation is global concept used everywhere in robotics graphics and so on not just in ROS.
3 I dont know if you understand the issue but this topic http://docs.ros.org/api/sensor_msgs/html/msg/LaserScan.html represent and defines a data from laser scan. TF is just used to locate laser_base in space relative to the robot_base.
Last thing. Feel free to ask I am beginner too and I also don't understand everything. Year before when I began with ros I had same questions as you. I know my explanation is also not the best but I hope it helps.
| | 4 | No.4 Revision |
Ok so I try to answer your questions. I dont have very good english so I hope you will understand.
1 When you load your urdf on a parameter server and then you run robot state publisher. It could create transformations for your robot. You dont need to create broadcaster. Robot state publisher will take as a parameter your robot_description and use it for creating transformations
2 This tutorial has nothing to do with mapping. It just shows and explains trasnformations. In the first part you create broadcaster which broadcasts transformation between base_laser and base_link. Then you choose arbitrary point in coordinate system of base_laser and transform it to coordinate system of base_link. And thats all, transformation represents orientation rotation and translation in space.
For better understanding I recommended you to watch this video https://www.youtube.com/watch?v=rTN4nawkrZs . Transformation is global concept used everywhere in robotics graphics and so on not just in ROS.
3 I dont know if you understand the issue but this topic http://docs.ros.org/api/sensor_msgs/html/msg/LaserScan.html represent and defines a data from laser scan. TF is just used to locate laser_base in space relative to the robot_base.
Last thing. Feel free to ask I am beginner too and I also don't understand everything. Year before when I began with ros I had same questions as you. I know my explanation is also not the best but I hope it helps.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.