
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
add this parameters to your dwa config file:
publish_traj_pc: true # default: false
global_frame_id: map # default: odom
Then in rviz add a pointcloud2 topic, make it listen to:
/move_base/DWAPlannerROS/trajectory_cloud
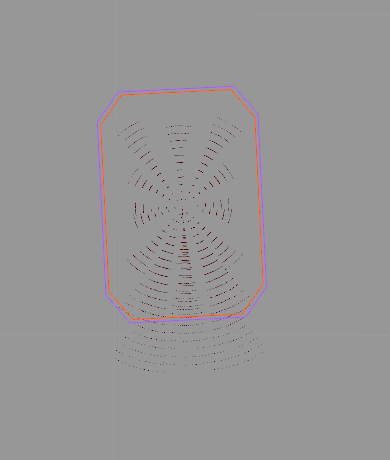
You should be able to see all dwa trajectory endpoints
| | 2 | No.2 Revision |
add this parameters to your dwa config file:
publish_traj_pc: true # default: false
global_frame_id: map # default: odom
Then in rviz add a pointcloud2 topic, make it listen to:
/move_base/DWAPlannerROS/trajectory_cloud
You should be able to see all dwa trajectory endpoints
| | 3 | No.3 Revision |
add this parameters to your dwa config file:
publish_traj_pc: true # default: false
global_frame_id: map # default: odom
Then in rviz add a pointcloud2 topic, make it listen to:
/move_base/DWAPlannerROS/trajectory_cloud
You should be able to see all dwa trajectory endpoints
| | 4 | No.4 Revision |
add this parameters to your dwa config file:
publish_traj_pc: true # default: false
global_frame_id: map # default: odom
Then in rviz add a pointcloud2 topic, make it listen to:
/move_base/DWAPlannerROS/trajectory_cloud
You should be able to see all dwa trajectory endpoints
It look like this: dwa_trajetories.png
| | 5 | No.5 Revision |
add this parameters to your dwa config file:
publish_traj_pc: true # default: false
global_frame_id: map # default: odom
Then in rviz add a pointcloud2 topic, make it listen to:
/move_base/DWAPlannerROS/trajectory_cloud
You should be able to see all dwa trajectory endpoints
It look like this: dwa_trajetories.png
| | 6 | No.6 Revision |
add this parameters to your dwa config file:
publish_traj_pc: true # default: false
global_frame_id: map # default: odom
Then in rviz add a pointcloud2 topic, make it listen to:
/move_base/DWAPlannerROS/trajectory_cloud
You should be able to see all dwa trajectory endpoints
It look like this: dwa_trajetories.png
credit: http://answers.ros.org/question/192143/dwa_planner-trajectory_cloud-topic-not-showing-up/
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.

{kind=link}