
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Hi,
By default rtabmap decimates by 4 RGB-D images to avoid creating very large point clouds. As depth images are already small for Tango, you can set cloud_decimation to 1:
<node pkg="rtabmap_ros" type="rtabmap" name="rtabmap">
<param name="cloud_decimation" value="1"/>
...
</node>
If you are only interested on odometry poses, open the database with standalone app $ rtabmap, "File" -> "Open Database..." and click "Edit" -> "Download graph-only" (choose not optimized to get odometry poses without graph corrections), then "File" -> "Export poses...".
You may also like the rtabmap-databaseViewer tool to inspect the odometry (neighbor) links in the database (View->Show Constraints).
cheers
| | 2 | No.2 Revision |
Hi,
By default rtabmap decimates by 4 RGB-D images to avoid creating very large point clouds. As depth images are already small for Tango, you can set cloud_decimation to 1:
<node pkg="rtabmap_ros" type="rtabmap" name="rtabmap">
<param name="cloud_decimation" value="1"/>
...
</node>
If you are only interested on odometry poses, open the database with standalone app $ rtabmap, "File" -> "Open Database..." and click "Edit" -> "Download graph-only" (choose not optimized to get odometry poses without graph corrections), then "File" -> "Export poses...".
You may also like the rtabmap-databaseViewer tool to inspect the odometry (neighbor) links in the database (View->Show Constraints).
UPDATE
Thank you for the database. I couldn't reproduce the exact error you have (showing only a part of the map) but it helped me to fix a bug when generating the projection maps with data from Tango (depth and rgb images are not the same size and the calibration wasn't updated).
Workaround for current binaries 0.11.7 (Hack: we subscribe at the same time to cloud_map to create XYZRGB clouds instead of XYZ clouds for the projection):
$ roscore
$ rosrun rtabmap_ros rtabmap _database_path:=~/Downloads/bigmap.db
$ rostopic hz /cloud_map
$ rosrun map_server map_saver map:=proj_map
$ rosservice call /publish_map 1 1 0
With the fix on 0.11.8:
$ roscore
$ rosrun rtabmap_ros rtabmap _database_path:=~/Downloads/bigmap.db
$ rosrun map_server map_saver map:=proj_map
$ rosservice call /publish_map 1 1 0
Note that cloud_decimation can stay at 4 since we apply decimation on the RGB image size instead of the depth image size.
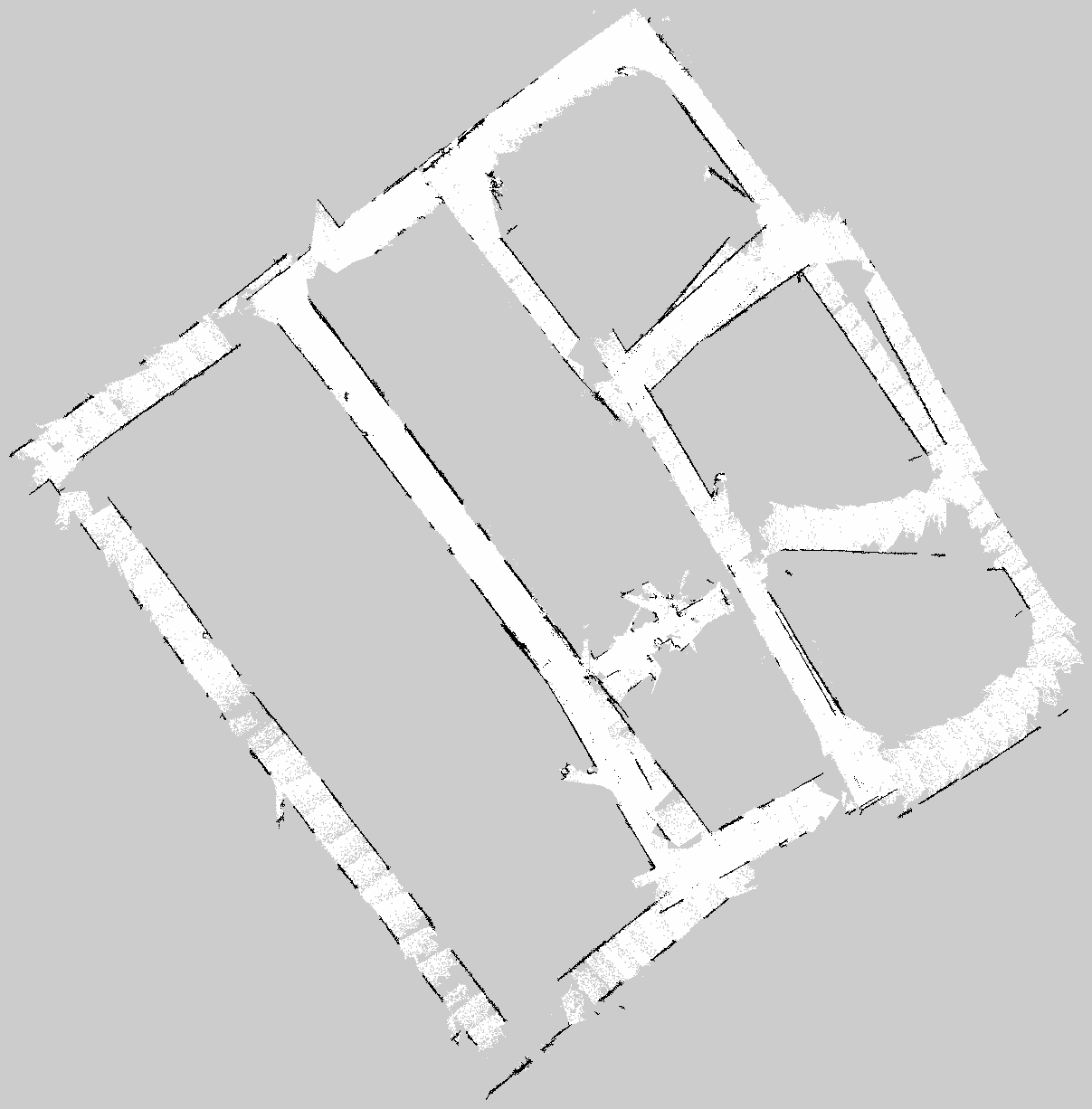
image: map.pgm
resolution: 0.050000
origin: [-37.192123, -27.229282, 0.000000]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.196
cheers
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
