
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
hi, @M@t, I'm stucking it this too.
but from your launch file, odom_demo.launch,
<remap from="odom" to="odometry/filtered/global" />
I think you should :
odom topic to odometry/filtered/local, which is move_base input.robot_localization package to new version.please share me the result. thanks!
| | 2 | No.2 Revision |
hi, @M@t, I'm stucking it in this too.
but from your launch file, odom_demo.launch,
<remap from="odom" to="odometry/filtered/global" />
I think you should :
odom topic to odometry/filtered/local, which is move_base input.robot_localization package to new version.please share me the result. thanks!
| | 3 | No.3 Revision |
hi, @M@t, I'm stucking in this too.
but from your launch file, odom_demo.launch,
<remap from="odom" to="odometry/filtered/global" />
I think you should :
odom topic to odometry/filtered/local, which is move_base input.robot_localization package to new version.please share me the result. thanks!
**update:**
sorry, is it correct? I think it should be /odometry/filtered/local topic feed into move_base, which is in your odom_demo.launch file.
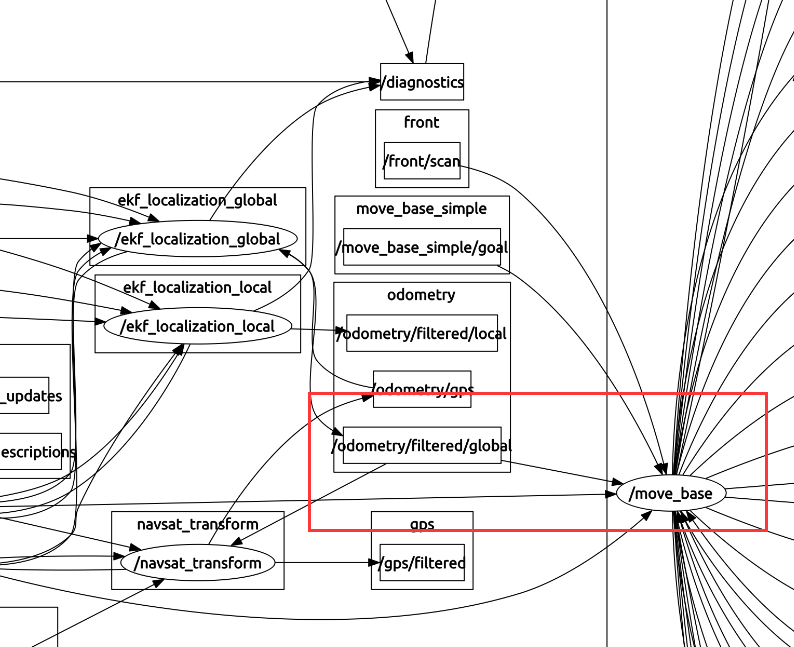 please correct me if i'm wrong.
please correct me if i'm wrong.
| | 4 | No.4 Revision |
hi, @M@t, I'm stucking in this too.
but from your launch file, odom_demo.launch,
<remap from="odom" to="odometry/filtered/global" />
I think you should :
odom topic to odometry/filtered/local, which is move_base input.robot_localization package to new version.please share me the result. thanks!
**update:**
sorry, is it correct? I think it should be /odometry/filtered/local topic feed into move_base, which is in your odom_demo.launch file.
file. please correct me if i'm wrong.
| | 5 | No.5 Revision |
hi, @M@t, I'm stucking in this too.
but from your launch file, odom_demo.launch,
<remap from="odom" to="odometry/filtered/global" />
I think you should :
odom topic to odometry/filtered/local, which is move_base input.robot_localization package to new version.please share me the result. thanks!
**update:**
sorry, is it correct? I think it should be /odometry/filtered/local topic feed into move_base, according to Navigation wiki, which is in your odom_demo.launch file. please Please correct me if i'm wrong.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
