
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I would like to summarize all the issues I faced and how I solved it:
First issue: The following error in uploading the program:
avrdude: ser_recv(): programmer is not responding avrdude: stk500_recv(): programmer is not responding
There were some solution using reset bottom but it didn't work for me. I finally found out I should use "sudo arduino" to lunch the arduino and after that I can easily upload.
Second issue: using "sudo arduino" gave me this error:
fatal error: ros.h: No such file or directory compilation terminated.
Unfortunately methods in internet didn't help me. I just tried to copy ros-lib form sketchbook to "/usr/share/arduino/libraries" and Hallelujah the error was gone! :)
Finally the main part of my code is as follows:
#include <ros.h>
#include <sensor_msgs/LaserScan.h>
void Callback_laser(const sensor_msgs::LaserScan& scan)
{
double minval = scan.ranges[0];
for(int i=0;i<500;i++)
{
if(scan.ranges[i]<minval or minval!=minval)
minval=scan.ranges[i];
}
Serial.println(minval);
}
ros::NodeHandle nh;
ros::Subscriber<sensor_msgs::LaserScan> laser_subscriber("scan", &Callback_laser);
void setup() {
nh.initNode();
nh.subscribe(laser_subscriber);
}
void loop() {
nh.spinOnce();
delay(100);
}
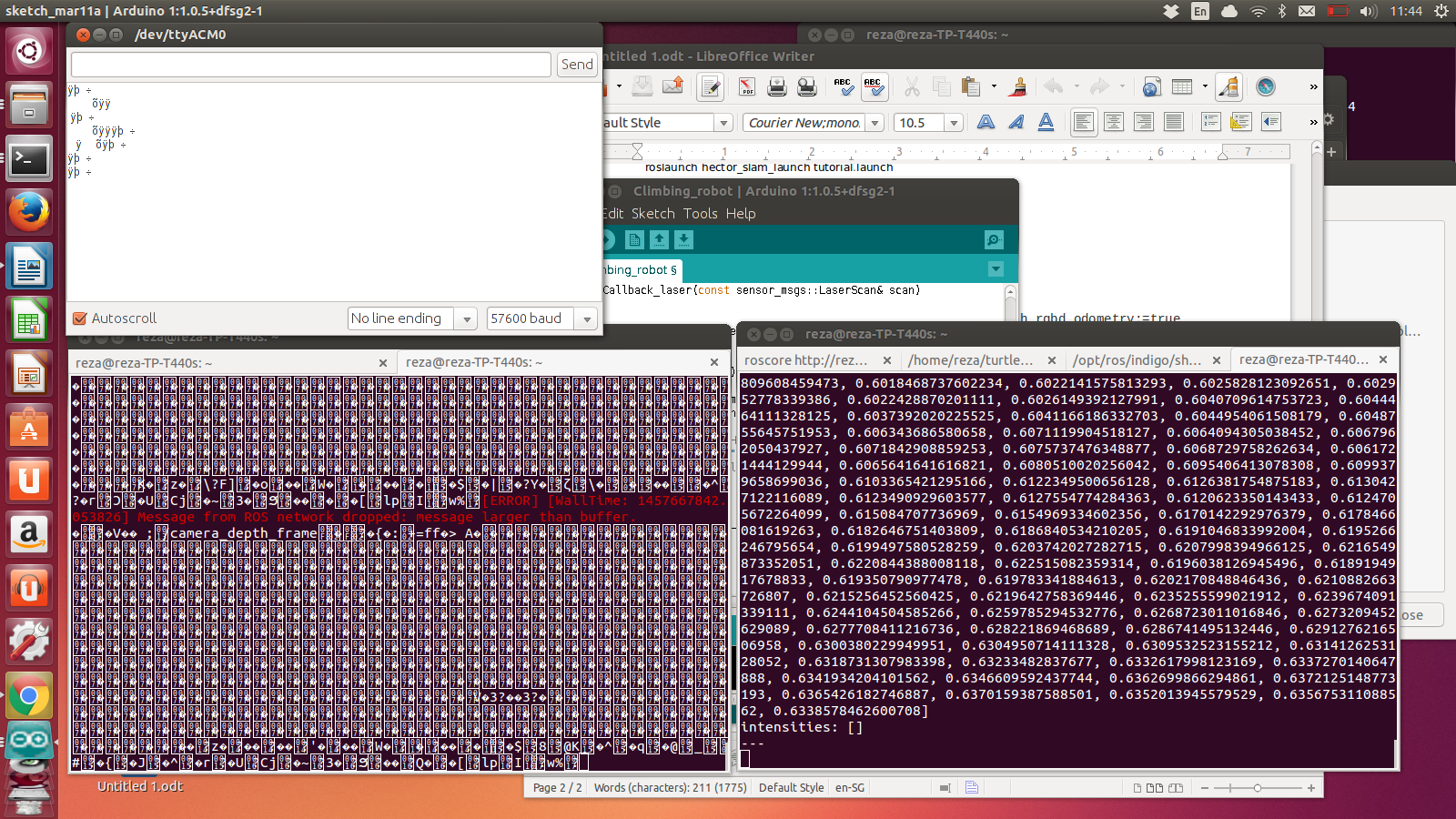
Apparently, it works fine but some strange characters are written in Serial monitor!
Even when I run "Hello World" program in ros-arduino tutorial, hello world with those strange characters are printed!
In the following attached picture you can see the results. right terminal I run "rostopic echo /scan"; left terminal I run "rosrun rosserial_python serial_node.py _port:=/dev/ttyACM0", and top is Serial monitor.
| | 2 | No.2 Revision |
I would like to summarize all the issues I faced and how I solved it:
First issue: The following error in uploading the program:
avrdude: ser_recv(): programmer is not responding avrdude: stk500_recv(): programmer is not responding
There were some solution using reset bottom but it didn't work for me. I finally found out I should use "sudo arduino" to lunch the arduino and after that I can easily upload.
Second issue: using "sudo arduino" gave me this error:
fatal error: ros.h: No such file or directory compilation terminated.
Unfortunately methods in internet didn't help me. I just tried to copy ros-lib form sketchbook to "/usr/share/arduino/libraries" and Hallelujah the error was gone! :)
Finally the main part of my code is as follows:
#include <ros.h>
#include <sensor_msgs/LaserScan.h>
void Callback_laser(const sensor_msgs::LaserScan& scan)
{
double minval = scan.ranges[0];
for(int i=0;i<500;i++)
{
if(scan.ranges[i]<minval or minval!=minval)
minval=scan.ranges[i];
}
Serial.println(minval);
}
ros::NodeHandle nh;
ros::Subscriber<sensor_msgs::LaserScan> laser_subscriber("scan", &Callback_laser);
void setup() {
nh.initNode();
nh.subscribe(laser_subscriber);
}
void loop() {
nh.spinOnce();
delay(100);
}
Apparently, I thought, it works fine but some strange characters are written apparently it's not!
When I put a command in Serial monitor! callback function to on the LED it doesn't on the LED.
I think the reason is the laserscan data is too large! (Not Sure Though)
Even when I run "Hello World" program in ros-arduino tutorial, hello world with those strange characters are printed!
In the following attached picture you can see the results. right terminal I run "rostopic echo /scan"; left terminal I run "rosrun rosserial_python serial_node.py _port:=/dev/ttyACM0", and top is Serial monitor.
| | 3 | No.3 Revision |
I would like to summarize all the issues I faced and how I solved it:
First issue: The following error in uploading the program:
avrdude: ser_recv(): programmer is not responding avrdude: stk500_recv(): programmer is not responding
There were some solution using reset bottom but it didn't work for me. I finally found out I should use "sudo arduino" to lunch the arduino and after that I can easily upload.
Second issue: using "sudo arduino" gave me this error:
fatal error: ros.h: No such file or directory compilation terminated.
Unfortunately methods in internet didn't help me. I just tried to copy ros-lib form sketchbook to "/usr/share/arduino/libraries" and Hallelujah the error was gone! :)
Finally the main part of my code is as follows:
#include <ros.h>
#include <sensor_msgs/LaserScan.h>
void Callback_laser(const sensor_msgs::LaserScan& scan)
{
double minval = scan.ranges[0];
for(int i=0;i<500;i++)
{
if(scan.ranges[i]<minval or minval!=minval)
minval=scan.ranges[i];
}
Serial.println(minval);
}
ros::NodeHandle nh;
ros::Subscriber<sensor_msgs::LaserScan> laser_subscriber("scan", &Callback_laser);
void setup() {
nh.initNode();
nh.subscribe(laser_subscriber);
}
void loop() {
nh.spinOnce();
delay(100);
}
I thought, it works fine but apparently it's not! it doesn't!
When I put a command in callback function to on the LED it doesn't on the LED.
I think the reason is the laserscan data is too large! (Not Sure Though)
Even when I run "Hello World" program in ros-arduino tutorial, hello world with those strange characters are printed!
In the following attached picture you can see the results. right terminal I run "rostopic echo /scan"; left terminal I run "rosrun rosserial_python serial_node.py _port:=/dev/ttyACM0", and top is Serial monitor.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.