
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
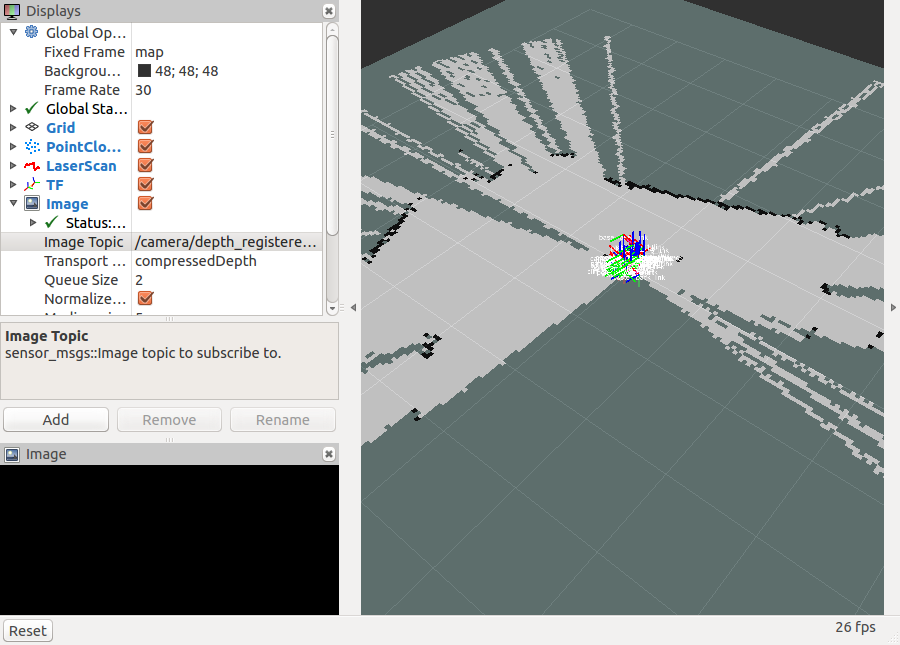
With the second rosbag, the depth image is blank. You can see it in RVIZ by subscribing to /camera/depth_registered/image_raw topic:
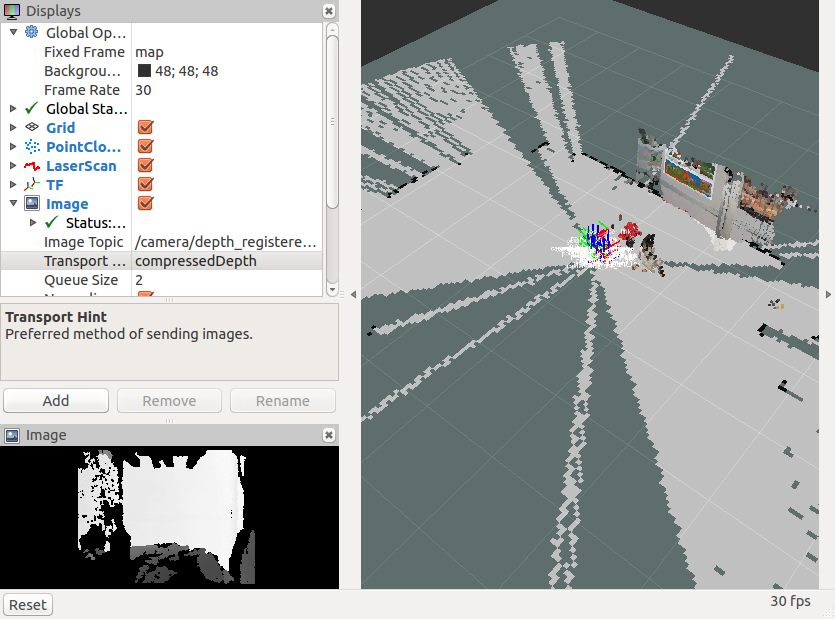
In comparison, here with the first rosbag:
Did you launch openni/freenect on turtlebot with "depth_registration:=true" parameter?
Mathieu
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
