
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I could fix the issue.
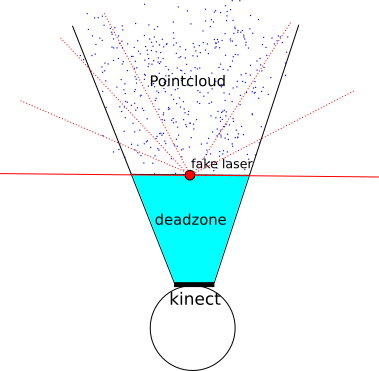
I am using the pointcloud_to_laserscan node and tell the node to transform the pointcloud to a frame where the pointcloud actually begins (at the border of the deadzone). The next step is to tell the costmap that my newly created sensor sits at the border of the deadzone. What happens is that the raytracing starts from the origin of this newly created laser. That way obstacles in the deadzone don't get raytraced away, because the fake laser is in front of the deadzone.
| | 2 | No.2 Revision |
I could fix the issue.
I am using the pointcloud_to_laserscan node and tell the node to transform the pointcloud to a frame where the pointcloud actually begins (at the border of the deadzone). The next step is to tell the costmap that my newly created sensor sits at the border of the deadzone. What happens is that the raytracing starts from the origin of this newly created laser. That way obstacles in the deadzone don't get raytraced away, because the fake laser is in front of the deadzone.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.