
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
The problems are in the data of imu, you are fusing this data of sensor with gps, you need know if the imu data are corrected, I paint your rute and have the next 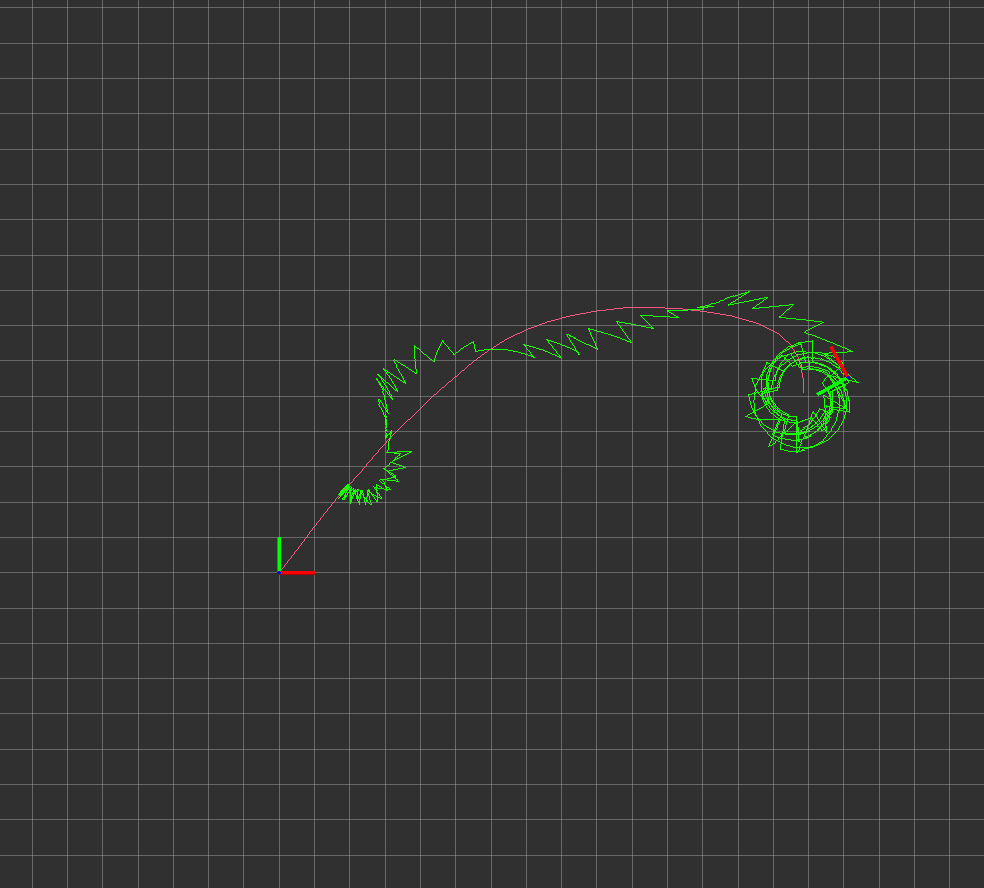 green is the path filtered and rose is the position gps, i created a tools for visualization.
The imu has follow the rep 103, try if the frame of imu is corrected, launch only the imu and test it.
green is the path filtered and rose is the position gps, i created a tools for visualization.
The imu has follow the rep 103, try if the frame of imu is corrected, launch only the imu and test it.
I changed your .launch
<launch>
<node pkg="rosbag" type="play" name="rosbag_play" output="screen" args="--clock /home/jorge_j/catkin_ulises/src/pruebas/covar_2015-10-05-10-02-06.bag -d 3"/>
<!-- <node pkg="rosbag" type="play" name="rosbag_play" output="screen" args="clock /home/Downloads/filtered.bag -d 3"/> -->
<node pkg="tf2_ros" type="static_transform_publisher" name="bl_imu" args="0 0 0 0 0 0 1 base_link imu_link" />
<param name="odom0_queue_size" value="10"/> -->
<!-- Global (map) instance -->
<node pkg="robot_localization" type="ekf_localization_node" name="ekf_localization_global" clear_params="true">
<param name="frequency" value="30"/>
<param name="sensor_timeout" value="0.1"/>
<param name="two_d_mode" value="true"/>
<param name="map_frame" value="map"/>
<param name="odom_frame" value="odom"/>
<param name="base_link_frame" value="base_link"/>
<param name="world_frame" value="odom"/>
<param name="transform_time_offset" value="0.0"/>
<!-- <param name="odom0" value="/jackal_velocity_controller/odom"/> -->
<param name="odom0" value="/odometry/gps"/>
<param name="imu0" value="/imu/data"/>
<!-- <rosparam param="odom0_config">[false, false, false,
false, false, false,
true, true, true,
false, false, true,
false, false, false]</rosparam> -->
<rosparam param="odom0_config">[true, true, false,
false, false, false,
false, false, false,
false, false, false,
false, false, false]</rosparam>
<rosparam param="imu0_config">[false, false, false,
true, true, true,
false, false, false,
true, true, true,
true, true, true]</rosparam>
<!-- <param name="odom0_differential" value="false"/> -->
<param name="odom0_differential" value="false"/>
<param name="imu0_differential" value="false"/>
<!-- <param name="odom0_relative" value="false"/> -->
<param name="odom0_relative" value="false"/>
<param name="imu0_relative" value="false"/>
<param name="imu0_remove_gravitational_acceleration" value="true"/>
<param name="print_diagnostics" value="true"/>
<!-- <param name="odom0_queue_size" value="10"/> -->
<param name="odom0_queue_size" value="10"/>
<param name="imu0_queue_size" value="10"/>
<param name="debug" value="false"/>
<param name="debug_out_file" value="debug_ekf_localization.txt"/>
<remap from="/odometry/filtered" to="/odometry/filtered/global"/>
</node>
<!-- navsat_transform -->
<node pkg="robot_localization" type="navsat_transform_node" name="navsat_transform" respawn="true" output="screen">
<param name="frequency" value="30"/>
<param name="delay" value="3"/>
<param name="magnetic_declination_radians" value="0.190240888"/>
<!-- <param name="magnetic_declination_radians" value="-0.161617489"/> -->
<!-- <param name="yaw_offset" value="1.570796327"/> -->
<param name="yaw_offset" value="1.570796327"/>
<param name="zero_altitude" value="false"/>
<param name="broadcast_utm_transform" value="true"/>
<param name="publish_filtered_gps" value="true"/>
<param name="use_odometry_yaw" value="true"/>
<param name="wait_for_datum" value="false"/>
<remap from="/odometry/filtered" to="/odometry/filtered/global"/>
<!-- <remap from="/gps/fix" to="/navsat/fix"/> -->
</node>
</launch>
| | 2 | No.2 Revision |
The problems are in the data of imu, you are fusing this data of sensor with gps, you need know if the imu data are corrected, I paint your rute and have the next green is the path filtered and rose is the position gps, i created a tools for visualization.
The imu has follow the rep 103, try if the frame of imu is corrected, launch only the imu and test it.it. The x axis of the base_link frame should point in the direction of advance of the robot
I changed your .launch
<launch>
<node pkg="rosbag" type="play" name="rosbag_play" output="screen" args="--clock /home/jorge_j/catkin_ulises/src/pruebas/covar_2015-10-05-10-02-06.bag -d 3"/>
<!-- <node pkg="rosbag" type="play" name="rosbag_play" output="screen" args="clock /home/Downloads/filtered.bag -d 3"/> -->
<node pkg="tf2_ros" type="static_transform_publisher" name="bl_imu" args="0 0 0 0 0 0 1 base_link imu_link" />
<param name="odom0_queue_size" value="10"/> -->
<!-- Global (map) instance -->
<node pkg="robot_localization" type="ekf_localization_node" name="ekf_localization_global" clear_params="true">
<param name="frequency" value="30"/>
<param name="sensor_timeout" value="0.1"/>
<param name="two_d_mode" value="true"/>
<param name="map_frame" value="map"/>
<param name="odom_frame" value="odom"/>
<param name="base_link_frame" value="base_link"/>
<param name="world_frame" value="odom"/>
<param name="transform_time_offset" value="0.0"/>
<!-- <param name="odom0" value="/jackal_velocity_controller/odom"/> -->
<param name="odom0" value="/odometry/gps"/>
<param name="imu0" value="/imu/data"/>
<!-- <rosparam param="odom0_config">[false, false, false,
false, false, false,
true, true, true,
false, false, true,
false, false, false]</rosparam> -->
<rosparam param="odom0_config">[true, true, false,
false, false, false,
false, false, false,
false, false, false,
false, false, false]</rosparam>
<rosparam param="imu0_config">[false, false, false,
true, true, true,
false, false, false,
true, true, true,
true, true, true]</rosparam>
<!-- <param name="odom0_differential" value="false"/> -->
<param name="odom0_differential" value="false"/>
<param name="imu0_differential" value="false"/>
<!-- <param name="odom0_relative" value="false"/> -->
<param name="odom0_relative" value="false"/>
<param name="imu0_relative" value="false"/>
<param name="imu0_remove_gravitational_acceleration" value="true"/>
<param name="print_diagnostics" value="true"/>
<!-- <param name="odom0_queue_size" value="10"/> -->
<param name="odom0_queue_size" value="10"/>
<param name="imu0_queue_size" value="10"/>
<param name="debug" value="false"/>
<param name="debug_out_file" value="debug_ekf_localization.txt"/>
<remap from="/odometry/filtered" to="/odometry/filtered/global"/>
</node>
<!-- navsat_transform -->
<node pkg="robot_localization" type="navsat_transform_node" name="navsat_transform" respawn="true" output="screen">
<param name="frequency" value="30"/>
<param name="delay" value="3"/>
<param name="magnetic_declination_radians" value="0.190240888"/>
<!-- <param name="magnetic_declination_radians" value="-0.161617489"/> -->
<!-- <param name="yaw_offset" value="1.570796327"/> -->
<param name="yaw_offset" value="1.570796327"/>
<param name="zero_altitude" value="false"/>
<param name="broadcast_utm_transform" value="true"/>
<param name="publish_filtered_gps" value="true"/>
<param name="use_odometry_yaw" value="true"/>
<param name="wait_for_datum" value="false"/>
<remap from="/odometry/filtered" to="/odometry/filtered/global"/>
<!-- <remap from="/gps/fix" to="/navsat/fix"/> -->
</node>
</launch>
| | 3 | No.3 Revision |
The problems are in the data of imu, you are fusing this data of sensor with gps, you need know if the imu data are corrected, I paint your rute and have the next green is the path filtered and rose is the position gps, i created a tools for visualization.
The imu has follow the rep 103, try if the frame of imu is corrected, launch only the imu and test it. The x axis of the base_link frame should point in the direction of advance of the robotrobot. The angular_velocity and lineal acceleration of imu not is consistent with vehicle movement
I changed your .launch
<launch>
<node pkg="rosbag" type="play" name="rosbag_play" output="screen" args="--clock /home/jorge_j/catkin_ulises/src/pruebas/covar_2015-10-05-10-02-06.bag -d 3"/>
<!-- <node pkg="rosbag" type="play" name="rosbag_play" output="screen" args="clock /home/Downloads/filtered.bag -d 3"/> -->
<node pkg="tf2_ros" type="static_transform_publisher" name="bl_imu" args="0 0 0 0 0 0 1 base_link imu_link" />
<param name="odom0_queue_size" value="10"/> -->
<!-- Global (map) instance -->
<node pkg="robot_localization" type="ekf_localization_node" name="ekf_localization_global" clear_params="true">
<param name="frequency" value="30"/>
<param name="sensor_timeout" value="0.1"/>
<param name="two_d_mode" value="true"/>
<param name="map_frame" value="map"/>
<param name="odom_frame" value="odom"/>
<param name="base_link_frame" value="base_link"/>
<param name="world_frame" value="odom"/>
<param name="transform_time_offset" value="0.0"/>
<!-- <param name="odom0" value="/jackal_velocity_controller/odom"/> -->
<param name="odom0" value="/odometry/gps"/>
<param name="imu0" value="/imu/data"/>
<!-- <rosparam param="odom0_config">[false, false, false,
false, false, false,
true, true, true,
false, false, true,
false, false, false]</rosparam> -->
<rosparam param="odom0_config">[true, true, false,
false, false, false,
false, false, false,
false, false, false,
false, false, false]</rosparam>
<rosparam param="imu0_config">[false, false, false,
true, true, true,
false, false, false,
true, true, true,
true, true, true]</rosparam>
<!-- <param name="odom0_differential" value="false"/> -->
<param name="odom0_differential" value="false"/>
<param name="imu0_differential" value="false"/>
<!-- <param name="odom0_relative" value="false"/> -->
<param name="odom0_relative" value="false"/>
<param name="imu0_relative" value="false"/>
<param name="imu0_remove_gravitational_acceleration" value="true"/>
<param name="print_diagnostics" value="true"/>
<!-- <param name="odom0_queue_size" value="10"/> -->
<param name="odom0_queue_size" value="10"/>
<param name="imu0_queue_size" value="10"/>
<param name="debug" value="false"/>
<param name="debug_out_file" value="debug_ekf_localization.txt"/>
<remap from="/odometry/filtered" to="/odometry/filtered/global"/>
</node>
<!-- navsat_transform -->
<node pkg="robot_localization" type="navsat_transform_node" name="navsat_transform" respawn="true" output="screen">
<param name="frequency" value="30"/>
<param name="delay" value="3"/>
<param name="magnetic_declination_radians" value="0.190240888"/>
<!-- <param name="magnetic_declination_radians" value="-0.161617489"/> -->
<!-- <param name="yaw_offset" value="1.570796327"/> -->
<param name="yaw_offset" value="1.570796327"/>
<param name="zero_altitude" value="false"/>
<param name="broadcast_utm_transform" value="true"/>
<param name="publish_filtered_gps" value="true"/>
<param name="use_odometry_yaw" value="true"/>
<param name="wait_for_datum" value="false"/>
<remap from="/odometry/filtered" to="/odometry/filtered/global"/>
<!-- <remap from="/gps/fix" to="/navsat/fix"/> -->
</node>
</launch>
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.