
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
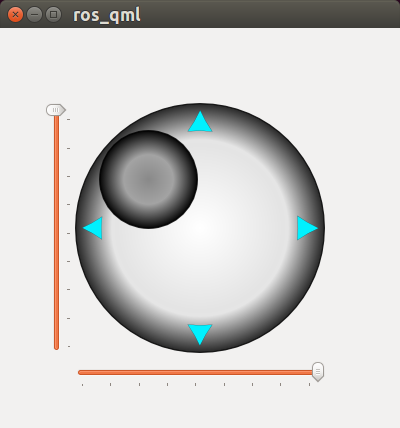
I was playing with QML and ROS recently and wrote ros_qml package. So here is a quick example mimicking your interface (I was unsure about artwork licence, so drew my own). You can easily extend it with all these maximum speeds etc.
To run example:
roslaunch ros_qml ros_qml.launch qml_url:=`rospack find ros_qml`/examples/joypad.qml
The sliders control axes scaling factors from 0.0 to 1.0. A geometry_msgs/Twist message is published while the thumb position changes. Once the mouse button released the thumb goes back to center.
Hope it helps.
P.S. The package depends on Qt 5.4, PyQt 5.4 (you may need to compile it for Python 2.7) and rospy_message_converter
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
