
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I was looking for the exact formula to calculate the real world X,Y,Z values by the depth image and finally I got it.
First of all, it appears that the values in the depth image are not giving the distance between any point in the real world and the origin of the Kinect. It appears that it is the distance between the point and Kinect's XY plane (the plane which is parallel to the front surface of Kinect). So, if Kinect is looking at a wall, all the depth values give about the same value. It doesn't matter the real distance between a point on the wall and Kinect's origin.
I found the calculations in the NuiSkeleton.h file: https://code.google.com/p/stevenhickson-code/source/browse/trunk/blepo/external/Microsoft/Kinect/NuiSkeleton.h?r=14
For the Z axis, in line 625, it says:
FLOAT fSkeletonZ = static_cast<FLOAT>(usDepthValue >> 3) / 1000.0f;
You don't have to worry about the bitshift operation because in the description of the method it says:
/// <param name="usDepthValue">
/// The depth value (in millimeters) of the depth image pixel, shifted left by three bits. The left
/// shift enables you to pass the value from the depth image directly into this function.
/// </param>
So, you can use the equation:
FLOAT fSkeletonZ = static_cast<FLOAT>(usDepthValue) / 1000.0f;
the unit is in meters (because of the division by 1000).
For X and Y axes, line 633 and 634 gives:
FLOAT fSkeletonX = (lDepthX - width/2.0f) * (320.0f/width) * NUI_CAMERA_DEPTH_IMAGE_TO_SKELETON_MULTIPLIER_320x240 * fSkeletonZ;
FLOAT fSkeletonY = -(lDepthY - height/2.0f) * (240.0f/height) * NUI_CAMERA_DEPTH_IMAGE_TO_SKELETON_MULTIPLIER_320x240 * fSkeletonZ;
The calculation of the Y axis starts with a minus sign because in a picture (like depth image) the Y value increases when you go down but in real world coordinates, conventionally, Y increases when you go up.
For the NUI_CAMERA_DEPTH_IMAGE_TO_SKELETON_MULTIPLIER_320x240 constant, line 349 defines:
#define NUI_CAMERA_DEPTH_IMAGE_TO_SKELETON_MULTIPLIER_320x240 (NUI_CAMERA_DEPTH_NOMINAL_INVERSE_FOCAL_LENGTH_IN_PIXELS)
a short Googling gives this page: http://msdn.microsoft.com/en-us/library/hh855368.aspx where it says
NUI_CAMERA_DEPTH_NOMINAL_INVERSE_FOCAL_LENGTH_IN_PIXELS (3.501e-3f)
So, using these formulas gives you the real world coordinates within the coordinate frame given in the image:
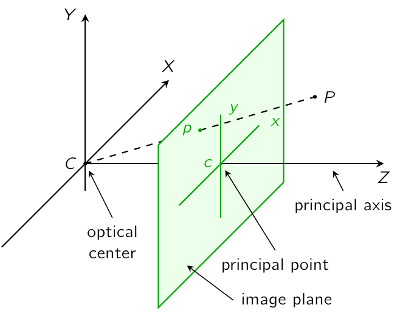
(ref: http://pille.iwr.uni-heidelberg.de/~kinect01/doc/reconstruction.html)
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.