
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
You may need to set the parameter before launching the nodes you want to introspect. I am able to monitor the statistics between turtlesim and the robot steering rqt plugin on my machine running indigo:
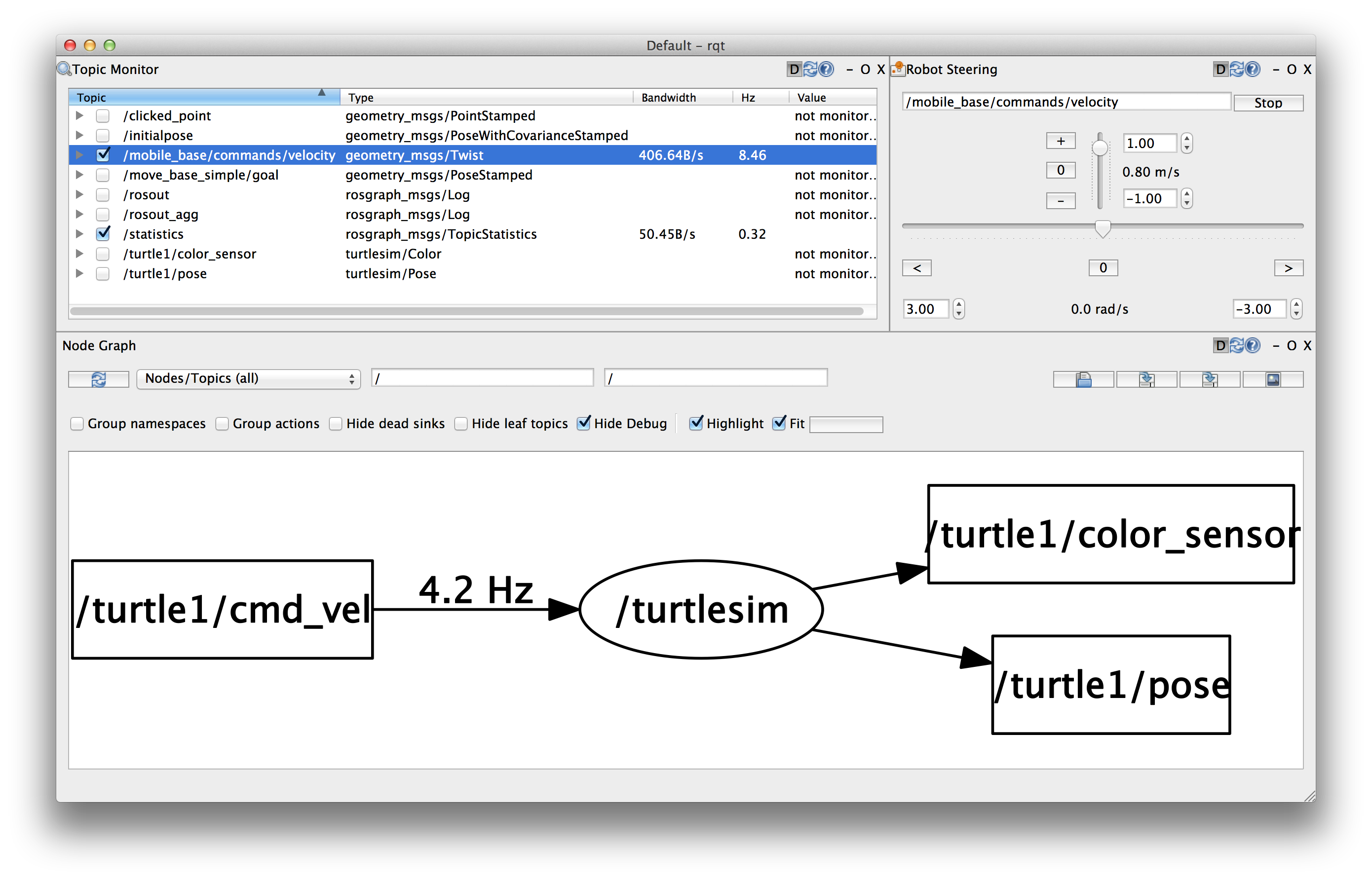
Also, remember that you need to manually refresh the rqt Node Graph window using the refresh button.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
