
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
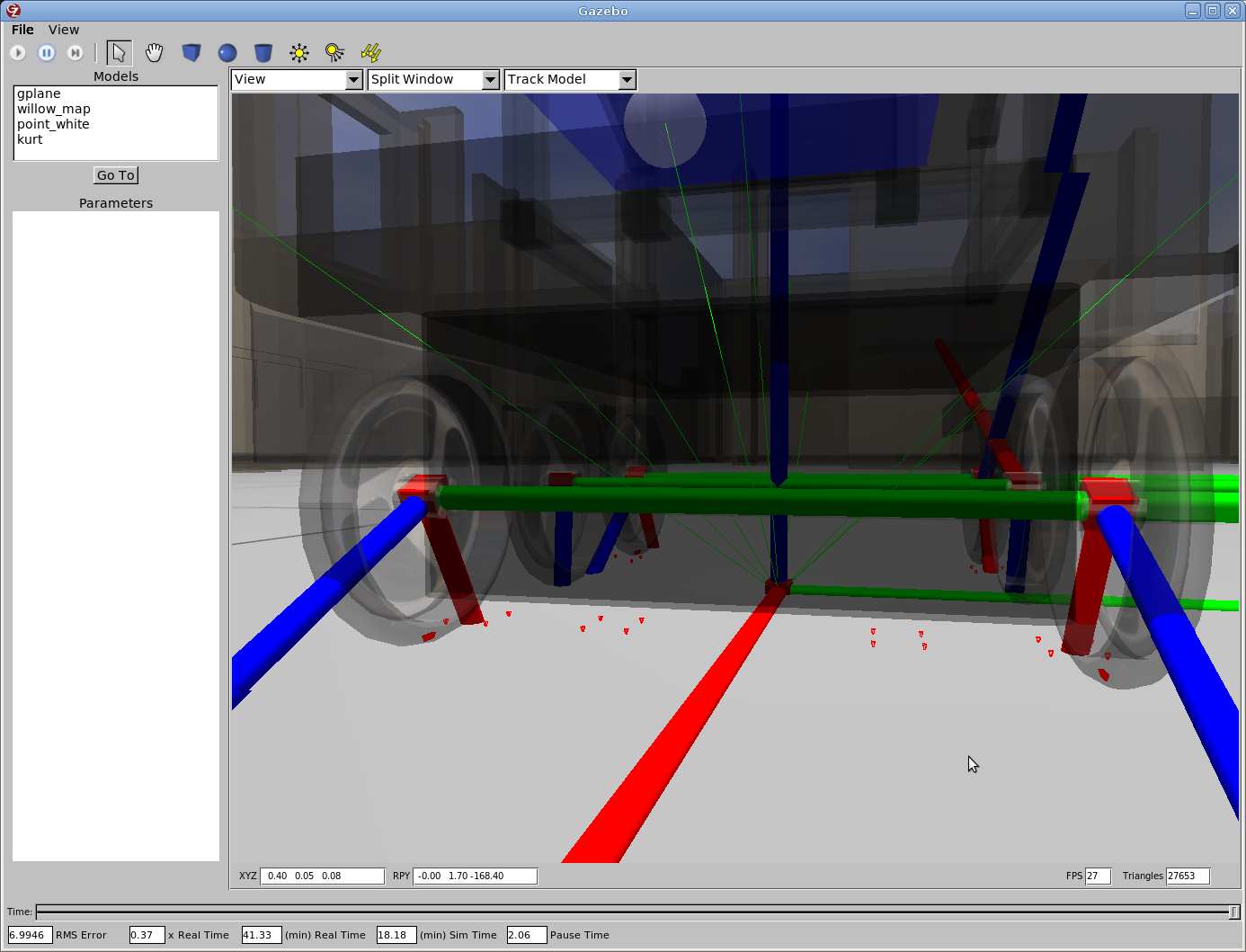
I noticed some extra contacts between the wheels (see photo), is something other than the wheel supposed to be touching the ground?
| | 2 | No.2 Revision |
I noticed some extra contacts on the ground between the wheels (see photophoto below), is something other than the wheel supposed to be touching the ground?
| | 3 | No.3 Revision |
I noticed some extra contacts on the ground between the wheels (see photo below), turns out the laptop_structure.dae is something other than the wheel supposed to be touching the ground?ground (if you enable the bounding box under view).
replacing laptop_structure.dae under collision with a small box fixed the problem, but I suspect something might have gone awry with the assimp dae mesh loader.
<?xml version="1.0"?>
<robot
xmlns:xacro="http://ros.org/wiki/xacro">
<include filename="$(find kurt_description)/parts/sick_lms200.urdf.xacro" />
<link name="laptop_structure">
<visual>
<geometry>
<mesh filename="package://kurt_description/meshes/laptop_structure.dae" />
</geometry>
</visual>
<collision>
<geometry>
<!--
<mesh filename="package://kurt_description/meshes/laptop_structure.dae" />
-->
<box size="0.01 0.01 0.01"/>
</geometry>
</collision>
<inertial>
<mass value="2.0" />
<origin xyz="-0.005401183 0.0 0.141356018" />
<inertia ixx="0.022277280" ixy="-0.000000004" ixz="-0.001009999"
iyy="0.017783837" iyz="0.0"
izz="0.025523417" />
</inertial>
</link>
<joint name="top_to_structure" type="fixed">
<parent link="base_link" />
<child link="laptop_structure" />
<origin xyz="-0.05 0 0.03" rpy="0 0 0" />
</joint>
<joint name="structure_to_laser" type="fixed">
<parent link="laptop_structure" />
<child link="laser" />
<origin xyz="0.195 0 0.08" rpy="0 0 0" />
</joint>
</robot>
| | 4 | No.4 Revision |
I noticed some extra contacts on the ground between the wheels (see photo below), turns out the laptop_structure.dae is touching the ground (if you enable the bounding box under view).
replacing laptop_structure.dae under collision with a small box fixed the problem, but I suspect something might have gone awry with the assimp dae mesh loader.
<?xml version="1.0"?>
<robot
xmlns:xacro="http://ros.org/wiki/xacro">
<include filename="$(find kurt_description)/parts/sick_lms200.urdf.xacro" />
<link name="laptop_structure">
<visual>
<geometry>
<mesh filename="package://kurt_description/meshes/laptop_structure.dae" />
</geometry>
</visual>
<collision>
<geometry>
<!--
<mesh filename="package://kurt_description/meshes/laptop_structure.dae" />
-->
<box size="0.01 0.01 0.01"/>
</geometry>
</collision>
<inertial>
<mass value="2.0" />
<origin xyz="-0.005401183 0.0 0.141356018" />
<inertia ixx="0.022277280" ixy="-0.000000004" ixz="-0.001009999"
iyy="0.017783837" iyz="0.0"
izz="0.025523417" />
</inertial>
</link>
<joint name="top_to_structure" type="fixed">
<parent link="base_link" />
<child link="laptop_structure" />
<origin xyz="-0.05 0 0.03" rpy="0 0 0" />
</joint>
<joint name="structure_to_laser" type="fixed">
<parent link="laptop_structure" />
<child link="laser" />
<origin xyz="0.195 0 0.08" rpy="0 0 0" />
</joint>
</robot>
alternatively, loading laptop_structure.dae with meshlab and saving as a stl, then modifying collision to use the stl (keep visual with dae for better aesthetics) also fixes this problem.
| | 5 | No.5 Revision |
I noticed some extra contacts on the ground between the wheels (see photo below), turns out the laptop_structure.dae is touching the ground (if you enable the bounding box under view).
replacing laptop_structure.dae under collision with a small box fixed the problem, but I suspect something might have gone awry with the assimp dae mesh loader.
<?xml version="1.0"?>
<robot
xmlns:xacro="http://ros.org/wiki/xacro">
<include filename="$(find kurt_description)/parts/sick_lms200.urdf.xacro" />
<link name="laptop_structure">
<visual>
<geometry>
<mesh filename="package://kurt_description/meshes/laptop_structure.dae" />
</geometry>
</visual>
<collision>
<geometry>
<!--
<mesh filename="package://kurt_description/meshes/laptop_structure.dae" />
-->
<box size="0.01 0.01 0.01"/>
</geometry>
</collision>
<inertial>
<mass value="2.0" />
<origin xyz="-0.005401183 0.0 0.141356018" />
<inertia ixx="0.022277280" ixy="-0.000000004" ixz="-0.001009999"
iyy="0.017783837" iyz="0.0"
izz="0.025523417" />
</inertial>
</link>
<joint name="top_to_structure" type="fixed">
<parent link="base_link" />
<child link="laptop_structure" />
<origin xyz="-0.05 0 0.03" rpy="0 0 0" />
</joint>
<joint name="structure_to_laser" type="fixed">
<parent link="laptop_structure" />
<child link="laser" />
<origin xyz="0.195 0 0.08" rpy="0 0 0" />
</joint>
</robot>
alternatively, loading laptop_structure.dae with meshlab and saving it as a stl, stl mesh, then modifying urdf collision to use the new stl (keep visual with dae for better aesthetics) also fixes this problem.
This deserves a ticket.
| | 6 | No.6 Revision |
I noticed some extra contacts on the ground between the wheels (see photo below), turns out the laptop_structure.dae is touching the ground (if you enable the bounding box under view).
replacing laptop_structure.dae under collision with a small box fixed the problem, but I suspect something might have gone awry with the assimp dae mesh loader.
<?xml version="1.0"?>
<robot
xmlns:xacro="http://ros.org/wiki/xacro">
<include filename="$(find kurt_description)/parts/sick_lms200.urdf.xacro" />
<link name="laptop_structure">
<visual>
<geometry>
<mesh filename="package://kurt_description/meshes/laptop_structure.dae" />
</geometry>
</visual>
<collision>
<geometry>
<!--
<mesh filename="package://kurt_description/meshes/laptop_structure.dae" />
-->
<box size="0.01 0.01 0.01"/>
</geometry>
</collision>
<inertial>
<mass value="2.0" />
<origin xyz="-0.005401183 0.0 0.141356018" />
<inertia ixx="0.022277280" ixy="-0.000000004" ixz="-0.001009999"
iyy="0.017783837" iyz="0.0"
izz="0.025523417" />
</inertial>
</link>
<joint name="top_to_structure" type="fixed">
<parent link="base_link" />
<child link="laptop_structure" />
<origin xyz="-0.05 0 0.03" rpy="0 0 0" />
</joint>
<joint name="structure_to_laser" type="fixed">
<parent link="laptop_structure" />
<child link="laser" />
<origin xyz="0.195 0 0.08" rpy="0 0 0" />
</joint>
</robot>
alternatively, loading laptop_structure.dae with meshlab and saving it as a stl mesh, then modifying urdf collision to use the new stl (keep visual with dae for better aesthetics) also fixes this problem.
| | 7 | No.7 Revision |
I noticed some extra contacts on the ground between the wheels (see photo below), turns out the laptop_structure.dae is touching the ground (if view below has contacts view enabled. The problem is also visible if you also enable the bounding box visualization under view).view.
replacing laptop_structure.dae under collision with a small box fixed the problem, but I suspect something might have gone awry with the assimp dae mesh loader.
<?xml version="1.0"?>
<robot
xmlns:xacro="http://ros.org/wiki/xacro">
<include filename="$(find kurt_description)/parts/sick_lms200.urdf.xacro" />
<link name="laptop_structure">
<visual>
<geometry>
<mesh filename="package://kurt_description/meshes/laptop_structure.dae" />
</geometry>
</visual>
<collision>
<geometry>
<!--
<mesh filename="package://kurt_description/meshes/laptop_structure.dae" />
-->
<box size="0.01 0.01 0.01"/>
</geometry>
</collision>
<inertial>
<mass value="2.0" />
<origin xyz="-0.005401183 0.0 0.141356018" />
<inertia ixx="0.022277280" ixy="-0.000000004" ixz="-0.001009999"
iyy="0.017783837" iyz="0.0"
izz="0.025523417" />
</inertial>
</link>
<joint name="top_to_structure" type="fixed">
<parent link="base_link" />
<child link="laptop_structure" />
<origin xyz="-0.05 0 0.03" rpy="0 0 0" />
</joint>
<joint name="structure_to_laser" type="fixed">
<parent link="laptop_structure" />
<child link="laser" />
<origin xyz="0.195 0 0.08" rpy="0 0 0" />
</joint>
</robot>
alternatively, loading laptop_structure.dae with meshlab and saving it as a stl mesh, then modifying urdf collision to use the new stl (keep visual with dae for better aesthetics) also fixes this problem.
This deserves a ticket.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.