
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Hi dornhege, thanks for your answer.
I tried to modify the chassis_footprint -> chassis tf as you said to me and the rare frame "jumps" problem and views it's solved.
tf_broadcaster is now:
broadcaster.sendTransform(tf::StampedTransform(tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0.0,0.0,0.0)),ros::Time::now(), "map", "odom"));
broadcaster.sendTransform(tf::StampedTransform(tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0.0,0.0,0.130)),ros::Time::now(),"chassis_footprint", "chassis"));
broadcaster.sendTransform(tf::StampedTransform(tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0.12,0.0,0.285)),ros::Time::now(),"chassis", "hokuyo_laser_link"));
However, the robot continues without following the path. When I launch the navigation stack and the rViz I don't see any error, only a few warnings like this:
[ WARN] Control loop missed its desired rate of 20.0000Hz... the loop actually took 0.0950 seconds
and this:
[ WARN] Message from [/guardian_odom_node] has a non-fully-qualified frame_id [odom]. Resolved locally to [/odom]. This is will likely not work in multi-robot systems. This message will only print once.
Answering to your question about nav_msgs/Odometry, I have a node that subscribes the joint_states topic, computes the odometry and publish it to the /odom topic.
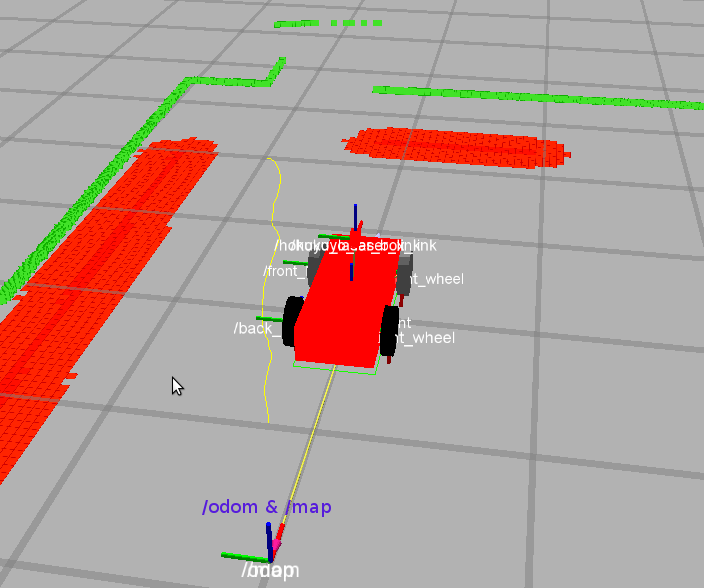
I moved the robot with the teleop so you can see the diferent frames and path. Do you see anything rare??
Thanks!
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.