
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
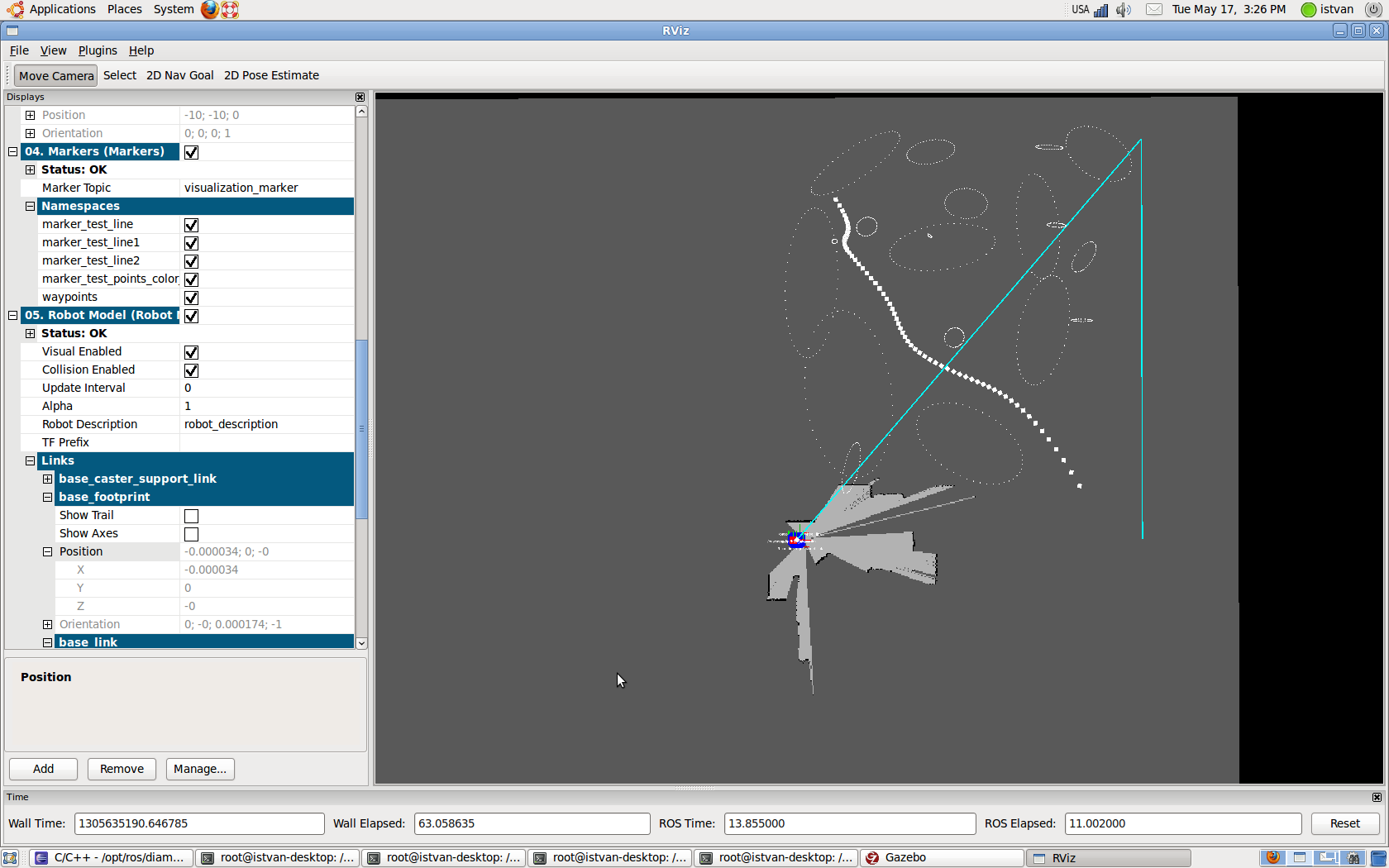
PLease check the 2 screenshots, the initial pose in gazebo is successfully set while in RViz the robot's initial position should be in the upper point of the dashed line. The "fixed frame" is set to /map. The "base_footprint" value is (0,0,0) due to the odom->base_footprint transform.Thank you.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}
{kind=link}