
Confusion with stereo camera coordinate frame [closed]

There were several comments that according to ROS convention the frame used with stereo pair should be attached to the left camera, however in my setup I observe the opposite behaviour, i.e. right camera seems to be correct place for the frame.
Below are the screenshots showing point cloud with overlaid laser scan. The first is when stereo_cam frame is attached to the left camera and the second - to the right camera.
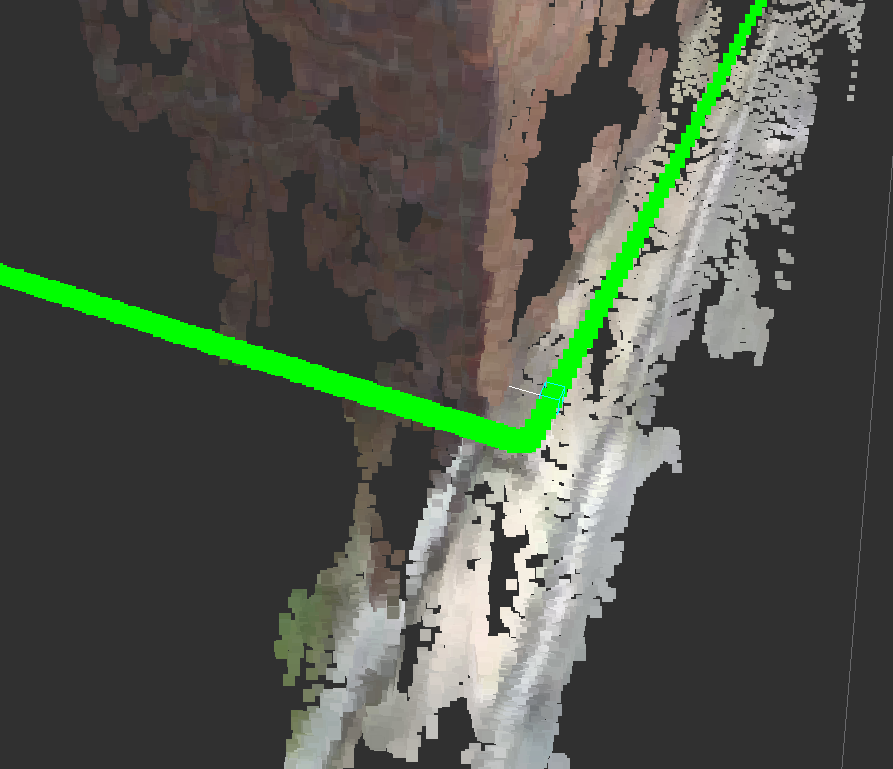
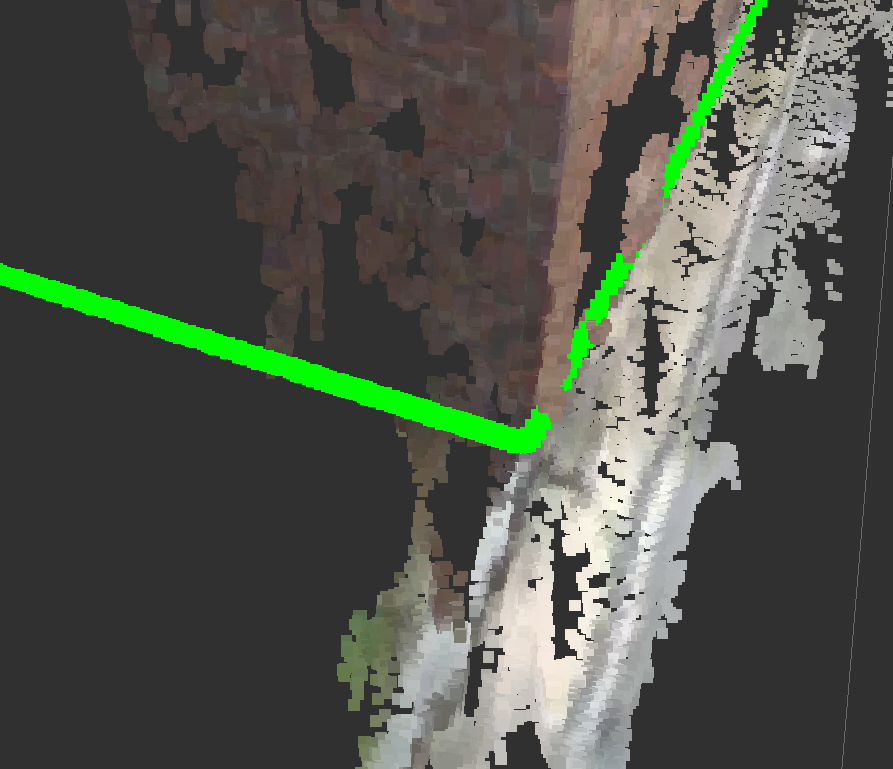
Both centers of laser and stereo pair are in the same plain (axis of symmetry of the car). Here is the tf setup for the latter case:
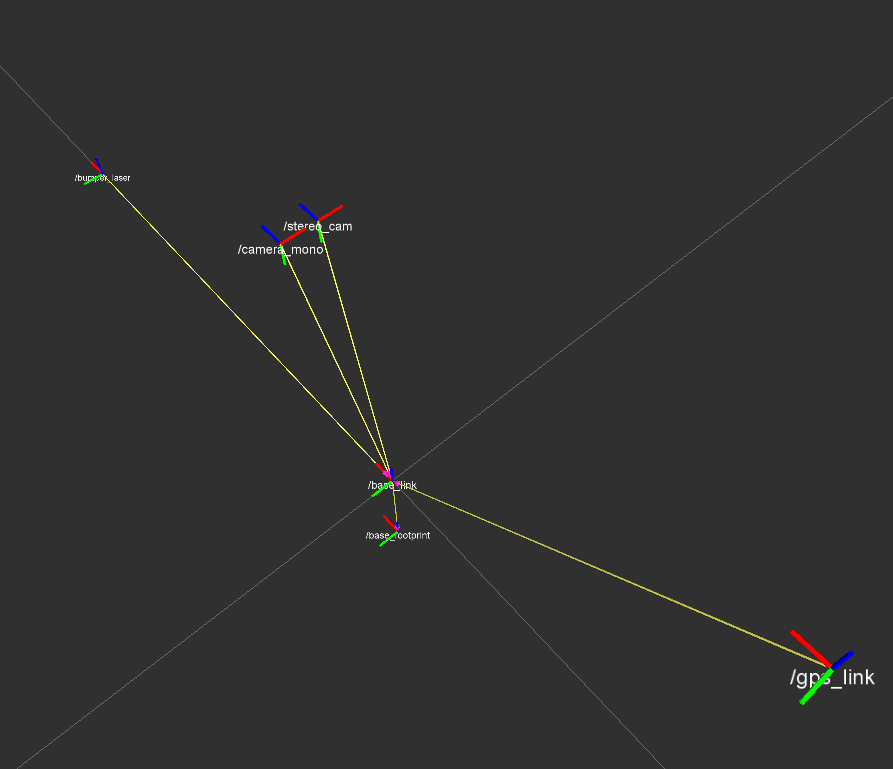
camera_mono frame is located in the center of stereo pair.
While trying to investigate this behaviour I found a reference to Springer Handbook of Robotics (pp.523-524) in the source of image_geometry/stereo_camera_model.cpp. However the original text made me even more confused. On the Fig.22.4 in the book the frame is attached to the left camera and has unprimed parameters and the right has primed. Nevertheless the comment after Eq.22.3 is saying:
The primed parameters are from the left projection matrix, the unprimed from the right.
Which is kind of opposite to the Fig.22.4.
Anyone can clarify this?
