
Hector SLAM+SICK (use_tf_scan_transformation true or false?)

Hello,
I am getting some troubles with Hector SLAM
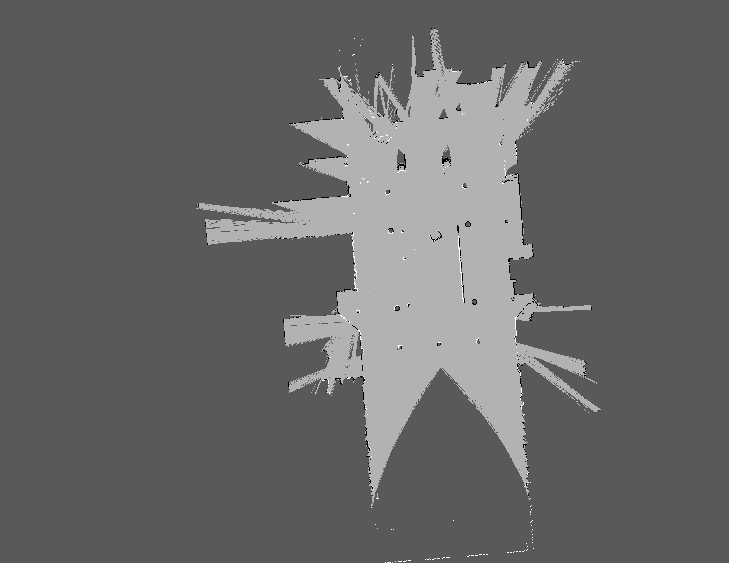
with (use_tf_scan_transformation=true) I get this map:
with (use_tf_scan_transformation=false) I get this map:
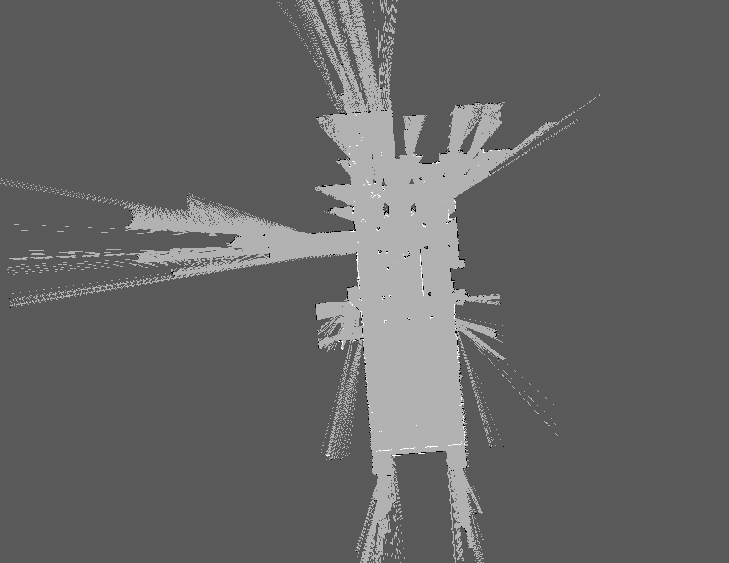
Of course the second one is much better (in the first, it seems that hector can't do mapping longer them X feets). Anyone can help-me and explain-me why this happens?
If anyone wants to try build a map with the bag file, please download: bag file: http://fbnsantos.com/Download/bag.tar.gz (in this bag please ignore the map in map topic, and use the launch and consider mapHector) launch file: http://fbnsantos.com/Download/ProAGV_Mapping_Hector_Slam_1.launch
We have two laser scanners, but we are interested only in Nav350Scan (which is a Sick Laser). We have developed the driver for this laser, so if you suspect that the problem is in publish data please tell-me. If anyone known other driver for this laser (Sick Nav 350 Scan) please tell advise-me.

