
Map and Laser error
Hello all
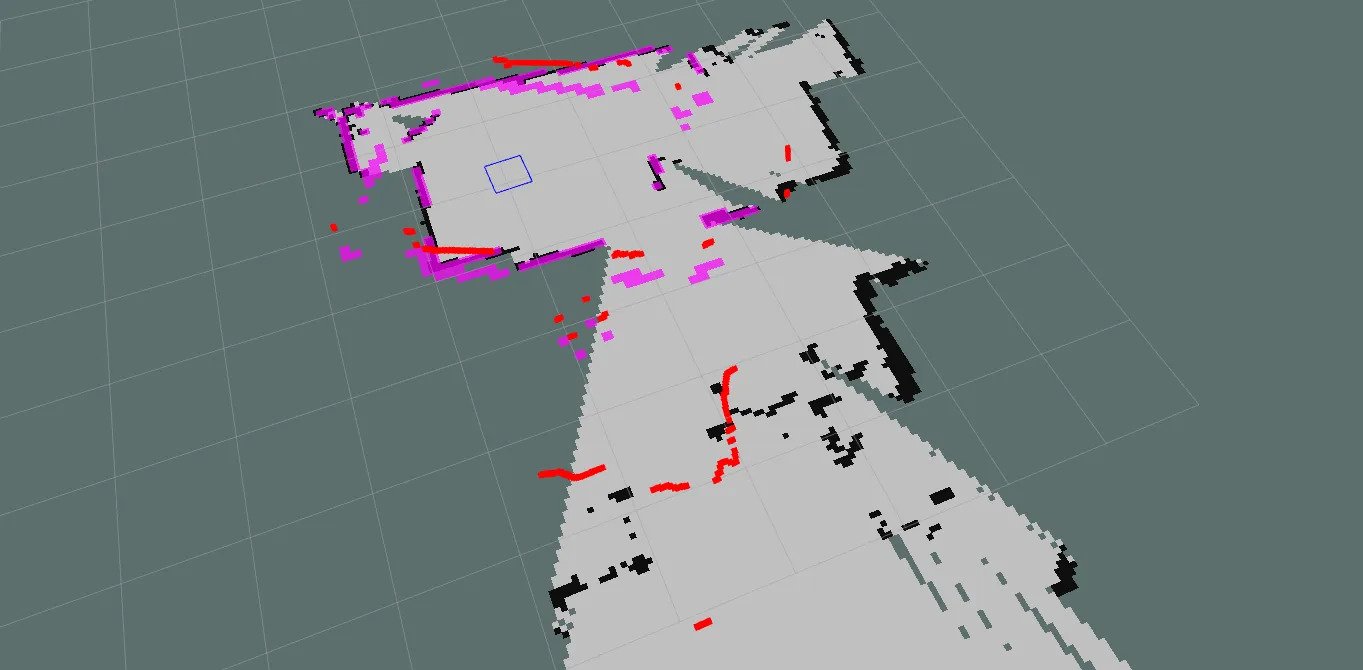
I am facing an issue when trying to navigate, the laser and the saved map data don't match causing some problems when giving a goal location and even when i give a pose there is still a big miss match between them .. how could solve this issue and what might by the cause for it ?
I am using RPlidar that is mounted on top of the robot with a differential drive robot that is getting odom data from two incremental encoders.

Over time, the odometry pose from your wheel encoders will slowly accumulate error. How are you correcting for this?
I don't know, the problem happens when the robot is rotating when the navigation goal is a straight line it work well