
IMU convention ENU (robot localization)

Hello
I'm starting to use the robot_localization package and would like to know if my inertial motion unit is in the ENU convention .. how can I know?
my imu WT901C - datasheet: http://wiki.wit-motion.com/english/li...
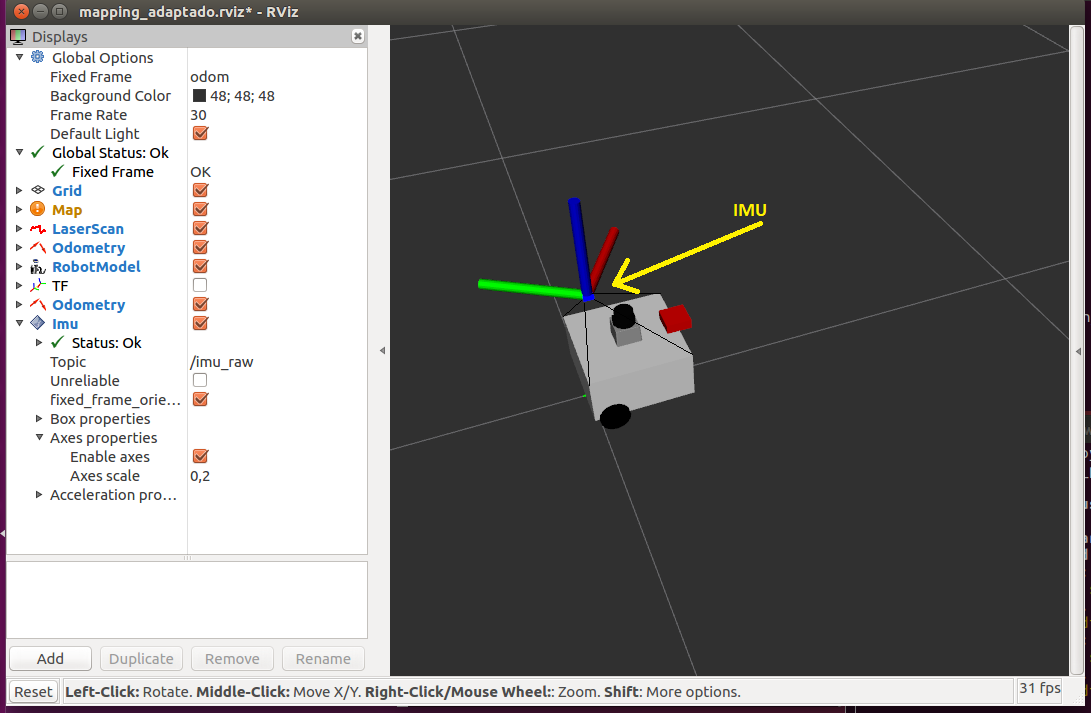
my /imu_raw
header:
seq: 79393
stamp:
secs: 1560259184
nsecs: 885230064
frame_id: "imu_link"
orientation:
x: -0.00958251953125
y: -0.00180053710938
z: -0.500183105469
w: -0.865844726562
orientation_covariance: [0.025, 0.0, 0.0, 0.0, 0.025, 0.0, 0.0, 0.0, 0.025]
angular_velocity:
x: 0.0
y: 0.0
z: 0.0
angular_velocity_covariance: [0.02, 0.0, 0.0, 0.0, 0.02, 0.0, 0.0, 0.0, 0.02]
linear_acceleration:
x: 0.067060546875
y: 0.1916015625
z: 9.86748046875
linear_acceleration_covariance: [0.04, 0.0, 0.0, 0.0, 0.04, 0.0, 0.0, 0.0, 0.04]
---
add a comment
