
How to retrieve absolute pose in ROS

Hello,
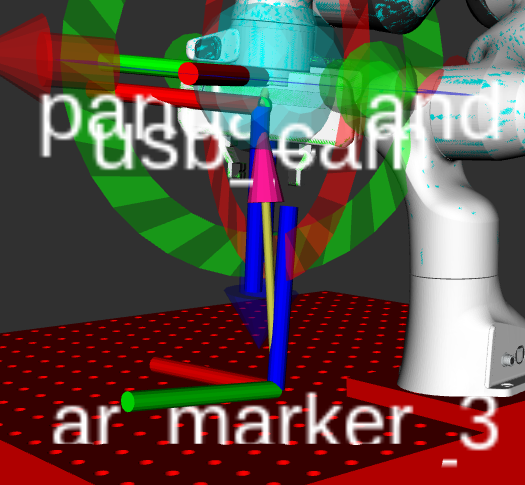
i'm currently doing the detection of ArUco and Alvar fiducial markers (glued on a cube), by that trying to grasp the cube with the detection of the marker. The camera is mounted on the Panda from Franka Emika, which is controlled by ROS with the aid of ROS MoveIt! (I'm sending some joint_values to the robot so we can kind of scan the table where he is on). There's a link to a video where one can see what i'm really doing.
Link: https://youtu.be/oiPJZO2T00k
Technical part:
I want to retrieve the absolute pose of the marker, i.e the transform from my first frame, in this case /world to ar_marker_3 and then send this to the robot as his goal. But for some reason (as seen in the video) every time the robot moves in the XY direction of the table, the frame of the marker varies as well, meaning the pose of the marker is actually not absolute (i presume). So my question is: is this correct? Or the way i'm thinking is wrong? I thought that the pose of the marker relative to the world SHOULD be always fixed since the marker is not moving.
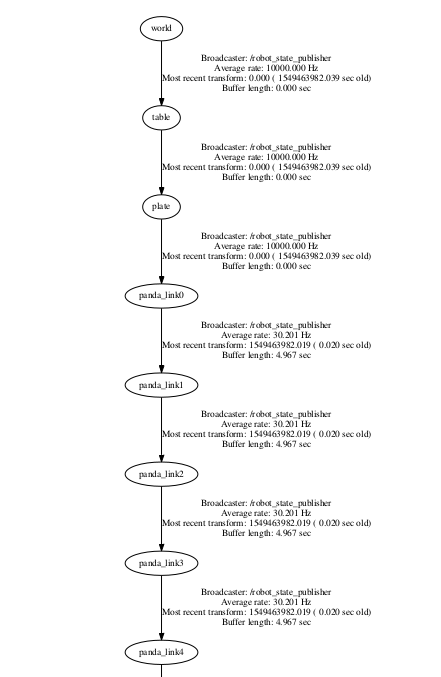
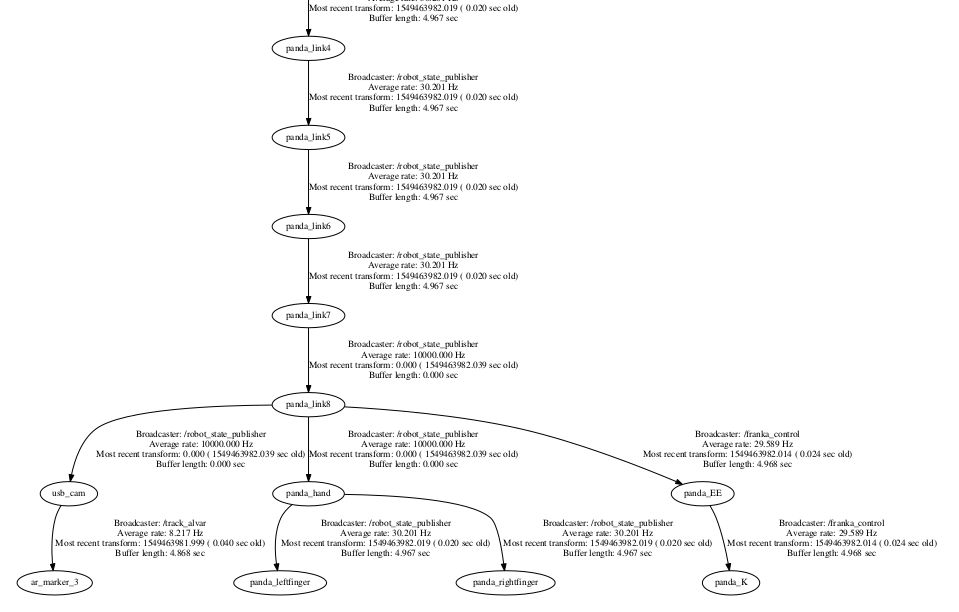
I think this question maybe not specific to ROS but robotics in general, but i'm quite in a dead end so any helpful would be nice! Thanks! Pictures of the tf_tree if it helps..

The pose will initially be detected in the camera's optical frame. This will need to be transformed with the correct timestamp into the world frame. Only then will it be fixed in the world frame.