
Bad results with Gmapping
Hey everyone,
I've got some trouble with gmapping.
I'm Using a robot called "eddie" witch is quiet similar to the Turtlebot2e, a kinect is the only used Sensor in this case. I wrote some nodes to get the Navigation Stack running( such as an odometry_publisher...) For the SLAM i thought gmapping would be a good choice. I used the Parameters they use with the turtlebot, but i get really bad results.
At first i thought my odometry could be the poblem. But the Odometry is realy good, as you can see on this Map (made with sigma and lsigma = 0 -> gmapping just used odometry. the robot did 21m of distance to create that map, asswell as all in all a rotation of 47rad(7,5 revolutions))
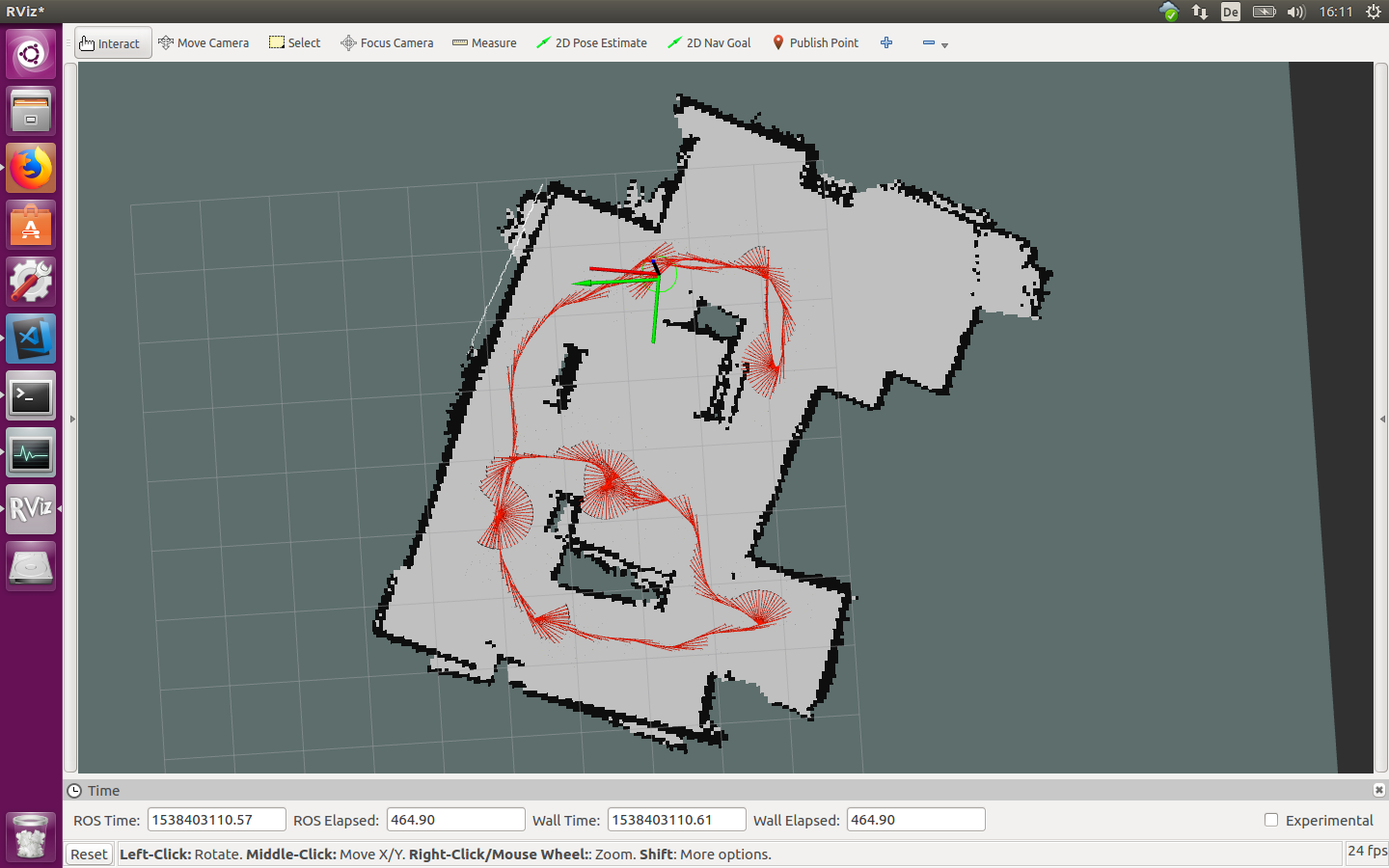
As soon as I change the sigma and lsigma back to a usefull value the resulst get as bad as this:
(made with the turtlebot paramters)
you can see the large jump in the top right corner.
most of the time gmapping says something like: Scan Matching Failed, using odometry. Likelihood=-3889.53
lp:3.94415 2.44182 -0.742944
if it can match the scans, it often jumps as in this case:

I use a notebook with an i7 620M (1st generation). Things i've tried:
-Recording bag file and play it with 10% speed ( to be sure, the notebook has enough power for gmapping)
incresing particles and anglarUpdate
many many parameters changed, always worse than befor!
Has anyone an idea why that happens? Thank you all so much!
Turtlebo Parameter:
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<param name="base_frame" value="$(arg base_frame)"/>
<param name="odom_frame" value="$(arg odom_frame)"/>
<param name="map_update_interval" value="5.0"/>
<param name="maxUrange" value="6.0"/>
<param name="maxRange" value="8.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="minimumScore" value="200"/>
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
<param name="linearUpdate" value="0.5"/>
<param name="angularUpdate" value="0.436"/>
<param name="temporalUpdate" value="-1.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="80"/>
<!--
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
make the starting size small for the benefit of the Android client's memory...
-->
<param name="xmin" value="-1.0"/>
<param name="ymin" value="-1.0"/>
<param name="xmax" value="1.0"/>
<param name="ymax" value="1.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
<remap from="scan" to="$(arg scan_topic ...