Create a clock (datatype/md5sum) for slam_gmapping
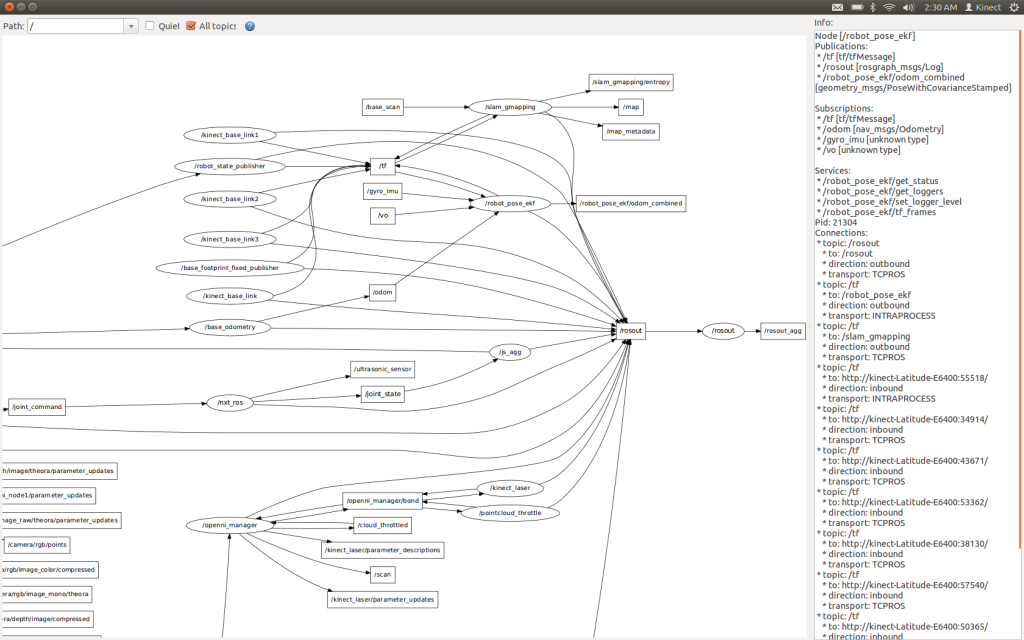
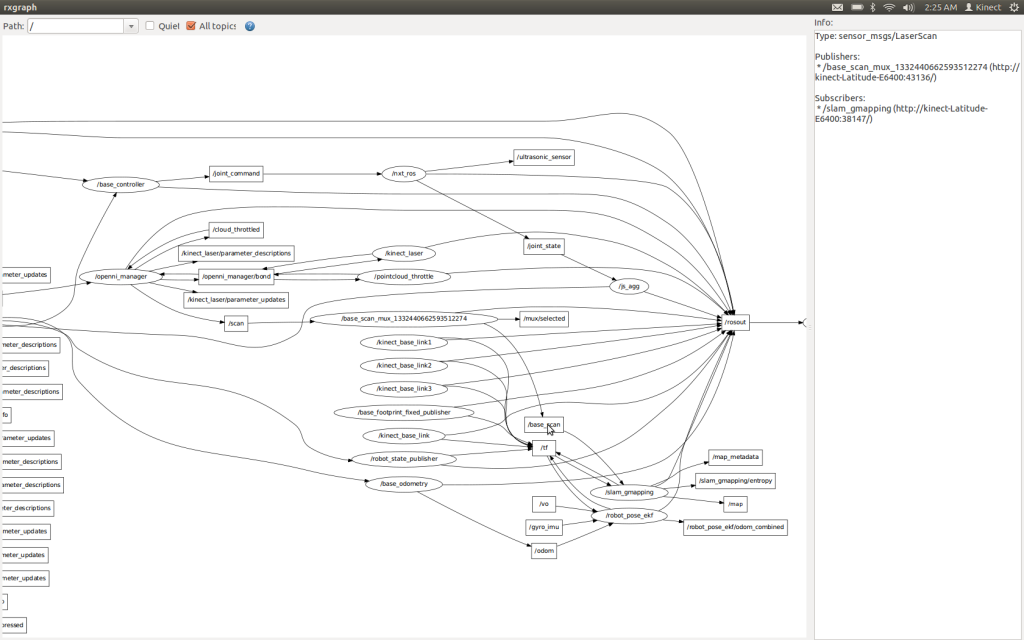
I have managed to do teleoperation, laser scan as well as passing tf to the slam_gmapping node. (As shown in the rxgraph below)
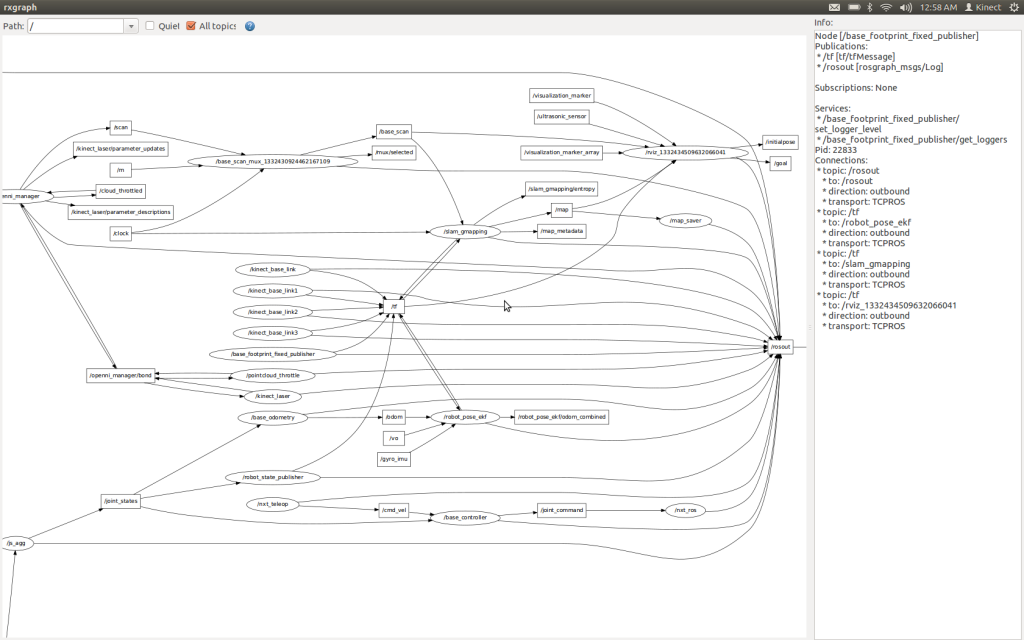
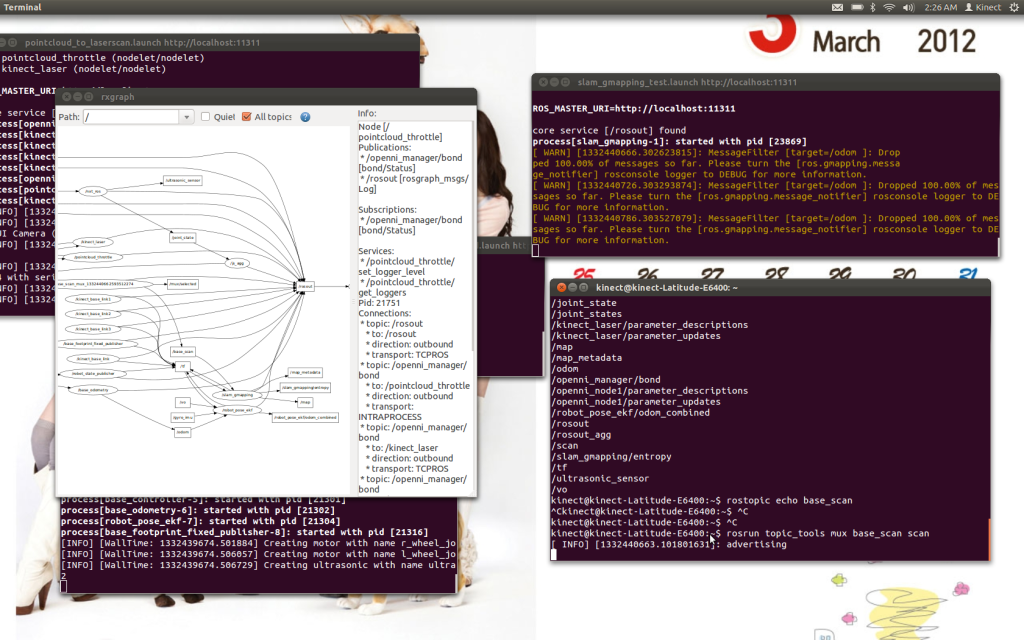
The only thing that is missing now is the "/clock" topic which has a md5sum datatype.
Question: 1) How to create a clock to use slam_gmapping on lego nxt instead of pr2?
add a comment