
Buggy map and using move_base with cartographer
I'm publishing to the /map top with cartographer, howerver when I visualize my costmap in rviz, I get this: 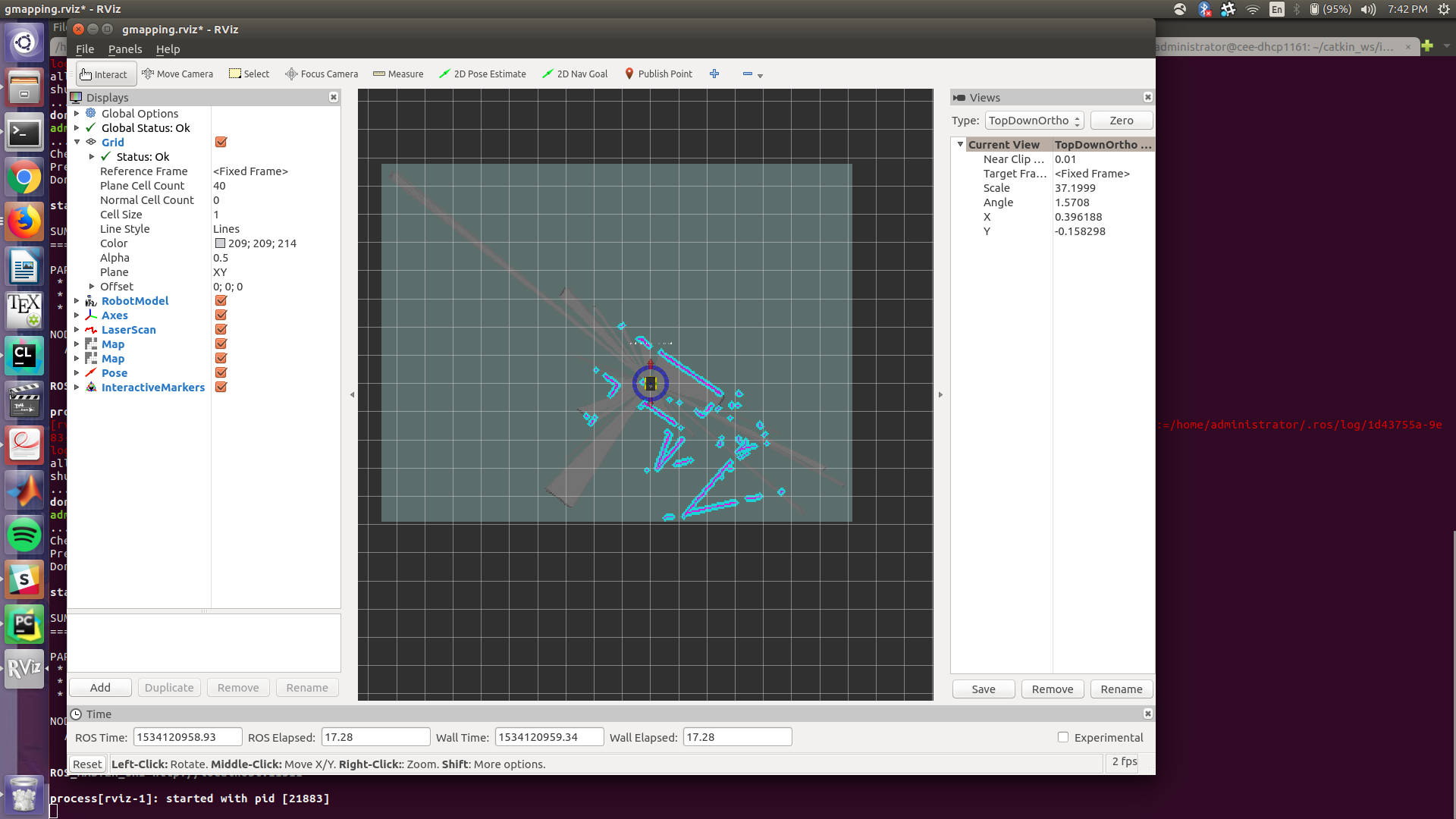 , which doesn't correspond with the underlying map. I don't get this issue when I'm generating my map with gmapping.
, which doesn't correspond with the underlying map. I don't get this issue when I'm generating my map with gmapping.
Cartographer settings: <launch> <node name="cartographer_node" pkg="cartographer_ros" type="cartographer_node" args=" -configuration_directory $(find cartographer_ros)/configuration_files -configuration_basename jackal_2d.lua" output="screen"> <remap from="echoes" to="front_laser"/> <remap from="imu" to="/imu/data"/> </node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
</launch>
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "base_link",
published_frame = "base_link",
odom_frame = "odom",
provide_odom_frame = true,
publish_frame_projected_to_2d = false,
use_odometry = false,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 1,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 10,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.num_accumulated_range_data = 10
For some reason, cartographer is interfering with my /scan topic:
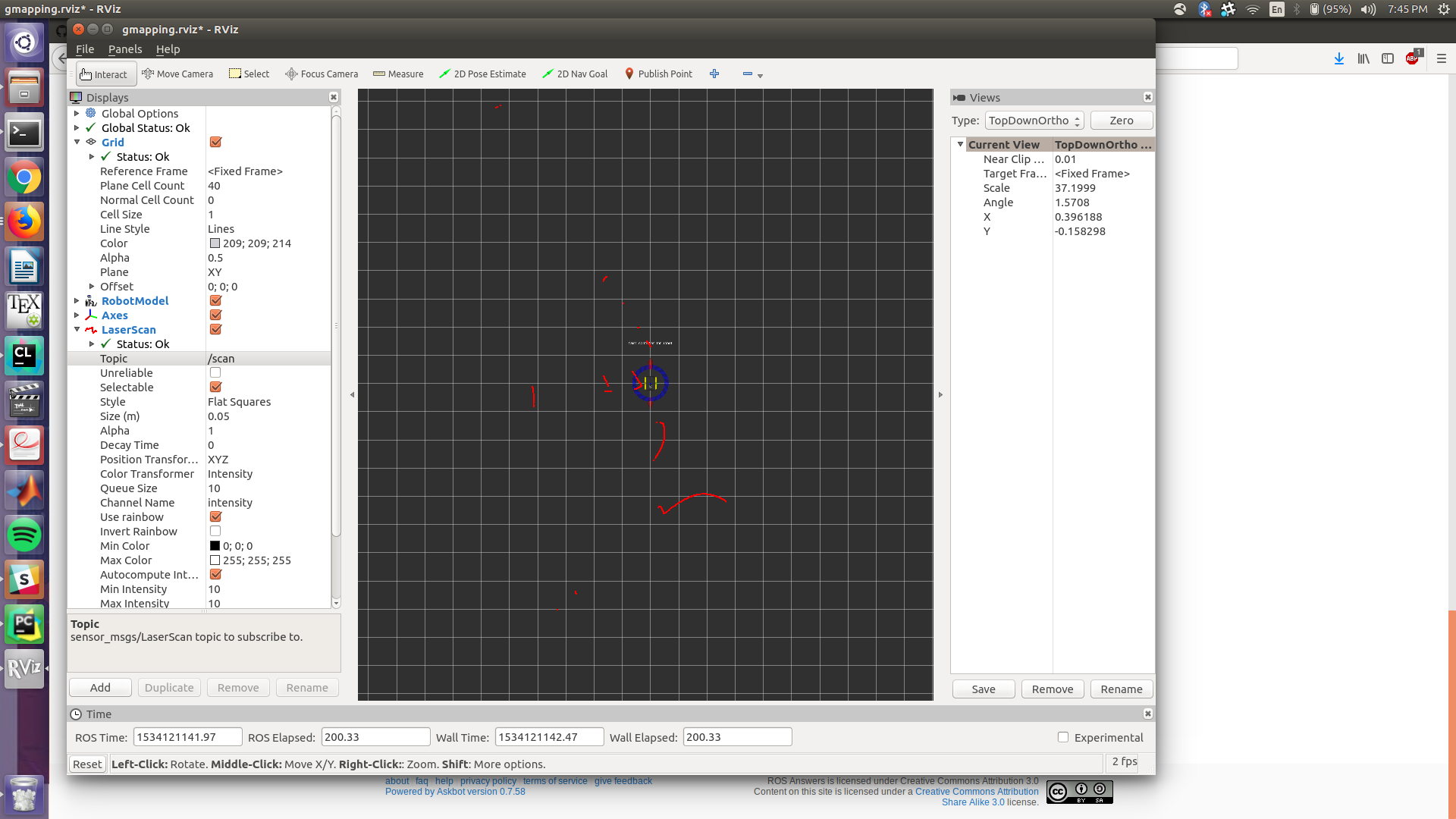 .
.
This is my tf tree:
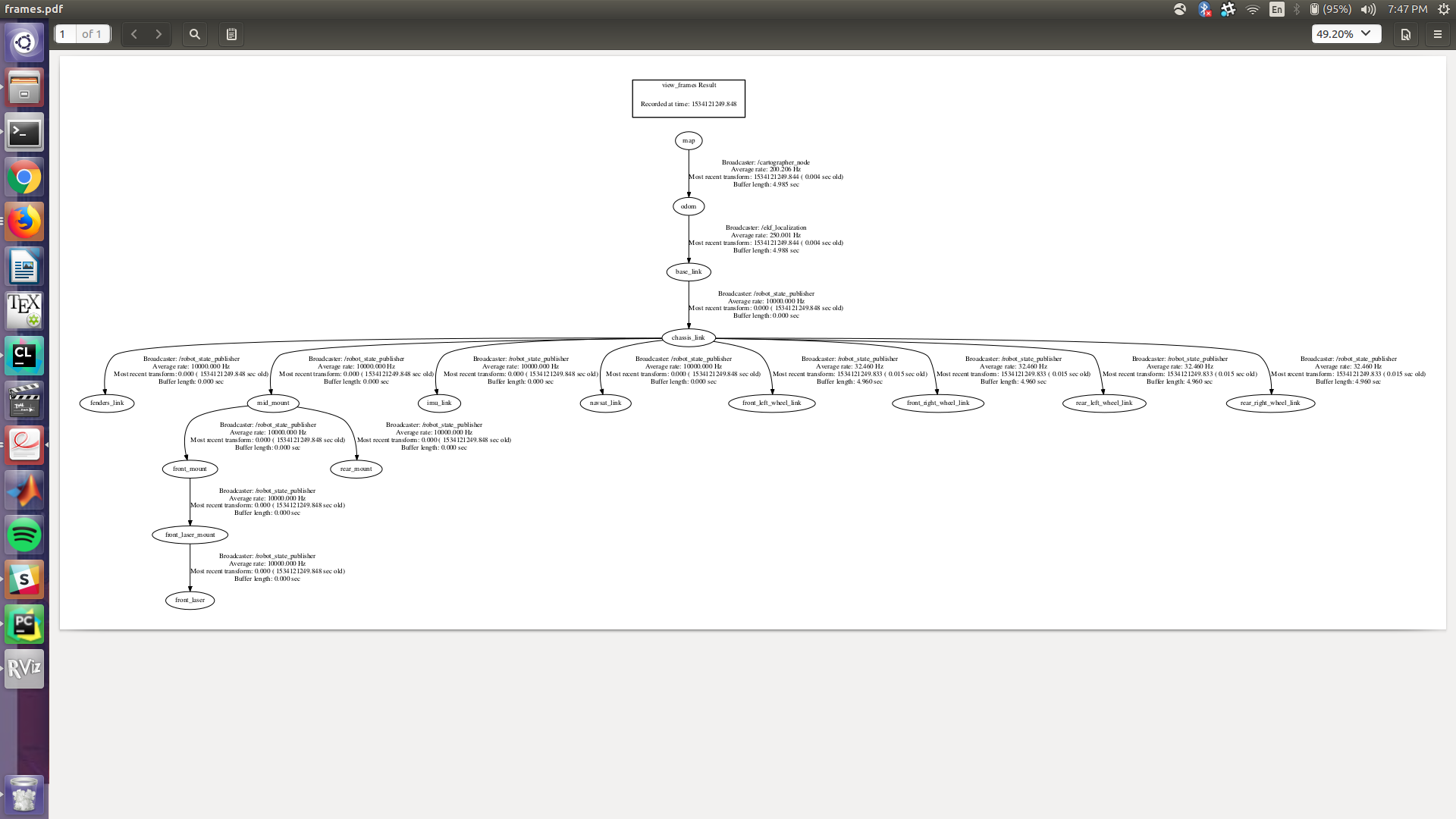 . Any ideas as to what's going wrong?
. Any ideas as to what's going wrong?
add a comment
