
Unable to build on the map
Dear ros wizards,
I am trying to make a map with octomap. For this, i am running gmapping (to get the map) and octomap altogether. GMapping is working perfect. However, for octomap, adding pointcloud2 topic in RVIZ gives out the following error:
For frame [velodyne]: No transform to fixed frame [map]. TF error: [Lookup would require extrapolation into the past. Requested time 1528145073.585485000 but the earliest data is at time 1528715125.526055026, when looking up transform from frame [velodyne] to frame [map]]
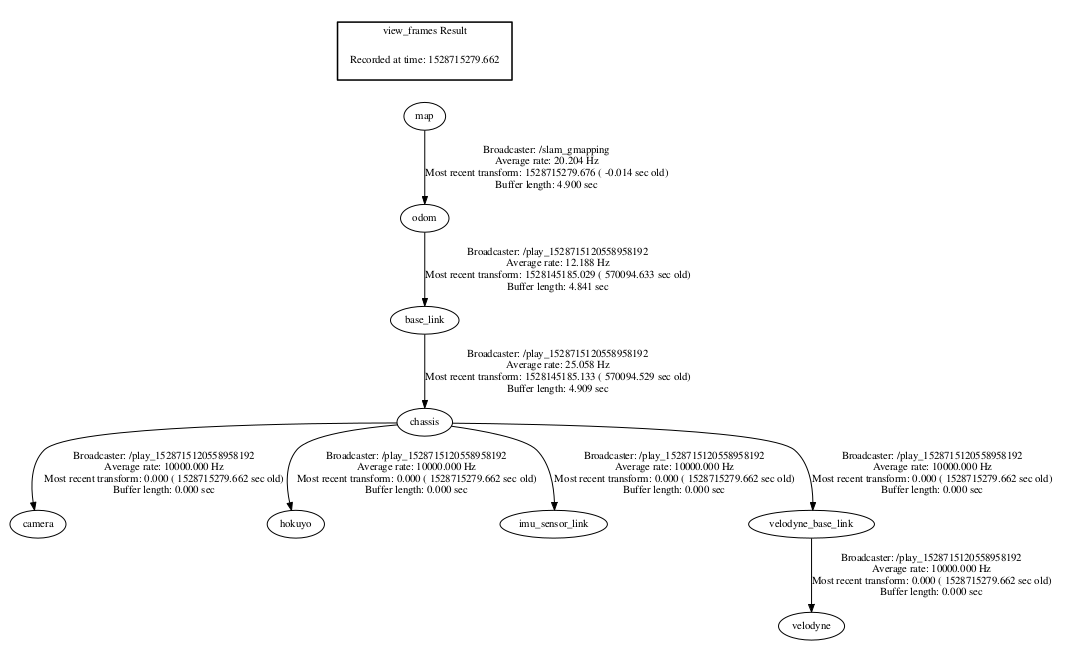
However, there exists a trsnsform between map and velodyne. This can be seen in the below image:
On the same hand; the markerarray topic gives out the following error in RVIZ: Message removed because it is too old (frame=[odom], stamp=[1528145113.324384000])
Please Note: I have ran the same bagfile/dataset on gmapping, cartographer and hector slam without any flaw.
Please Note: When changing topic from map to any other frame (odom, camera, base_link, velodyne etc); it works okey; but the quality of map acquired is worthless than due to obvious reasons.
