
When working with amcl why does the robot try to move closer to the wall in an open area rather than navigating more towards the goal?

For example, the following
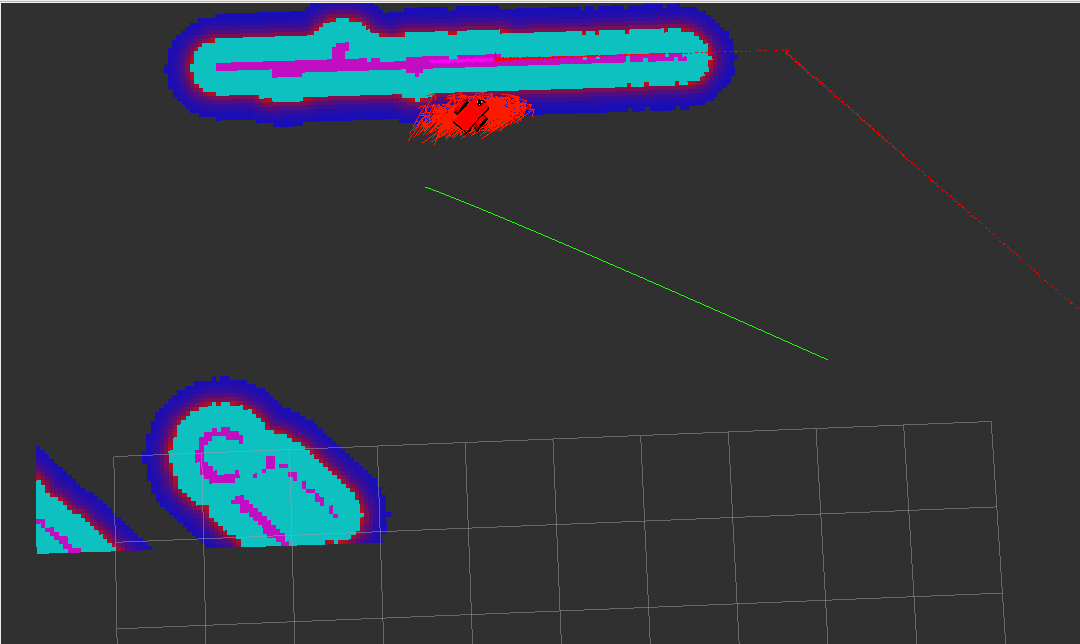
The robot is closer to the wall instead of following the path to the goal (green line).
I have noticed that happen all the time. Why is that so? Is there a particular parameter that influences this? As soon as the robot gets close to the wall it gets better at navigating straight to the goal I think. Or is it something related to amcl algorithm(s)?
Here is the robot shortly after reaching close to wall and then moving towards the goal again.
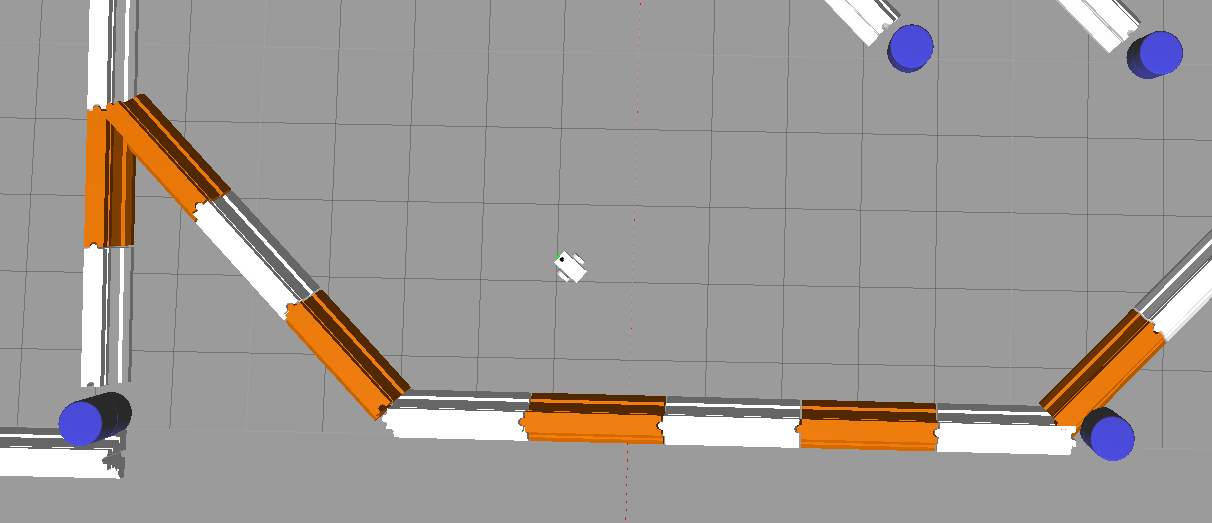
What causes such a pattern/behavior?
Update Based on Comment:
Here are some of the config/params I am working with.
move_base node
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find robot)/config/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find robot)/config/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find robot)/config/local_costmap_params.yaml" command="load" />
<rosparam file="$(find robot)/config/global_costmap_params.yaml" command="load" />
<rosparam file="$(find robot)/config/base_local_planner_params.yaml" command="load" />
<param name="controller_frequency" value="10.0"/>
<param name="planner_frequency" value="10.0"/>
<remap from="cmd_vel" to="cmd_vel"/>
<remap from="odom" to="odom"/>
<remap from="scan" to="robot/laser/scan"/>
</node>
costmap_common_params.yaml
map_type: costmap
origin_z: 0.0
z_resolution: 1
z_voxels: 2
obstacle_range: 2.5
raytrace_range: 3.0
publish_voxel_map: false
transform_tolerance: 0.5
meter_scoring: true
robot_radius: 0.3
inflation_radius: .6
observation_sources: laser_scan_sensor
laser_scan_sensor: {sensor_frame: hokuyo, data_type: LaserScan, topic: /robot/laser/scan, marking: true, clearing: true}
global_costmap_params.yaml
global_costmap:
global_frame: map
robot_base_frame: chassis
update_frequency: 10.0
publish_frequency: 5.0
width: 40.0
height: 40.0
resolution: 0.05
origin_x: -20.0
origin_y: -20.0
static_map: true
rolling_window: false
local_costmap_params.yaml
local_costmap:
global_frame: map
robot_base_frame: chassis
update_frequency: 10.0
publish_frequency: 5.0
width: 10.0
height: 10.0
resolution: 0.05
static_map: false
rolling_window: true
base_local_planner_params.yaml
TrajectoryPlannerROS:
max_vel_x: 0.5
min_vel_x: 0.1
max_vel_theta: 1.5
min_in_place_vel_theta: 0.314
acc_lim_theta: 20.0
acc_lim_x: 10.0
acc_lim_y: 5.0
holonomic_robot: false


This is not related to AMCL, which is a localization node. This is related to the navigation package and the planners you are using. Please post the config files you are using...
@Procopio Updated my question. Thanks!