
Go from gmapping to hector_slam
Hello! I have working gmapping for my robot. Now i want to use hector_slam instead of it. But have some problems. I use laser data and odometry. in gmapping everything works fine. But when i try to use hector_slam i have message SearchDir angle change too large. And map building wrong.
I also use move_base with both of it.
Here is my launch files for gmapping and hector_slam: gmapping launch hector_slam launch
And launch.xml (for tuning up): gmapping launch.xml hector_slam launch.xml
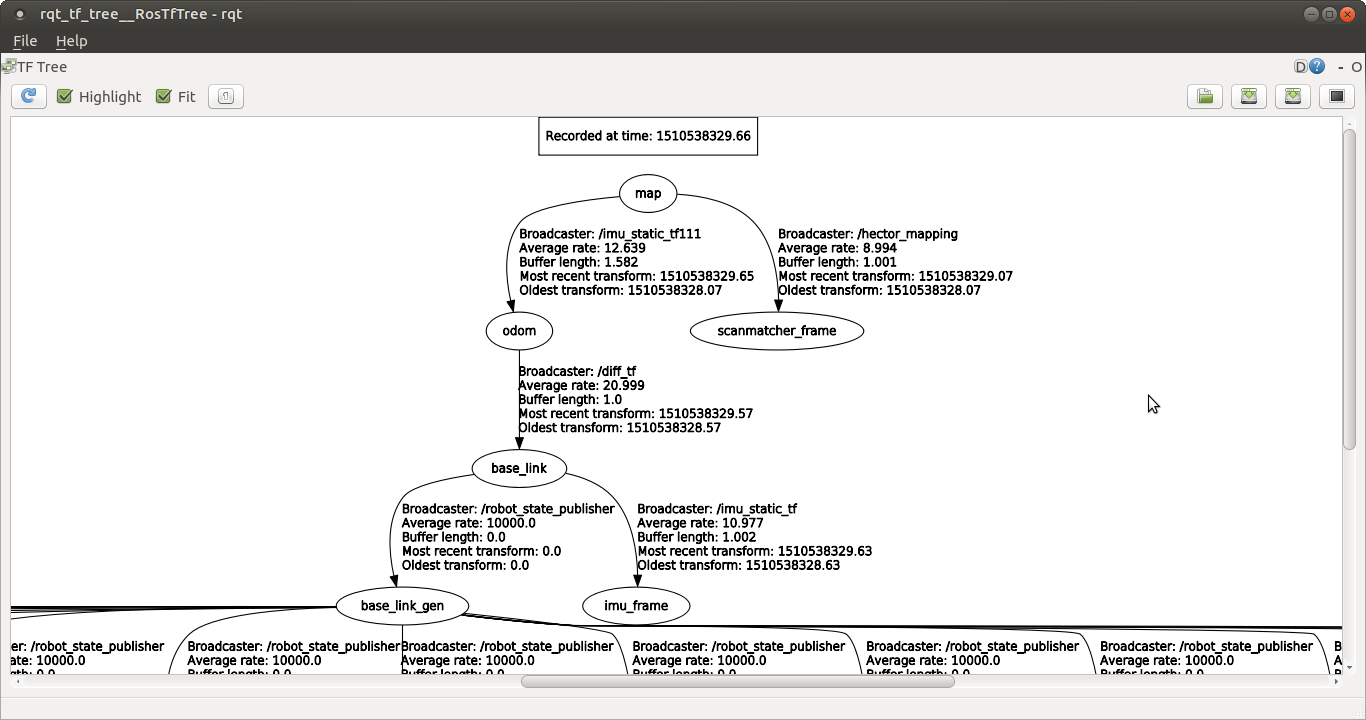
Here fragment of my tf tree in hector_slam (please do not pay attention to imu_frame :))
Please tell me what's my mistake and how can i go from gmapping to hector_slam?

For the record, I'm running into the same issue. Did you ever find a solution? I'm going to keep working on it and I'll try to follow up if I do figure it out.