
move_group with 2DOF workpiece positioner and 6DOF robot
Hello all,
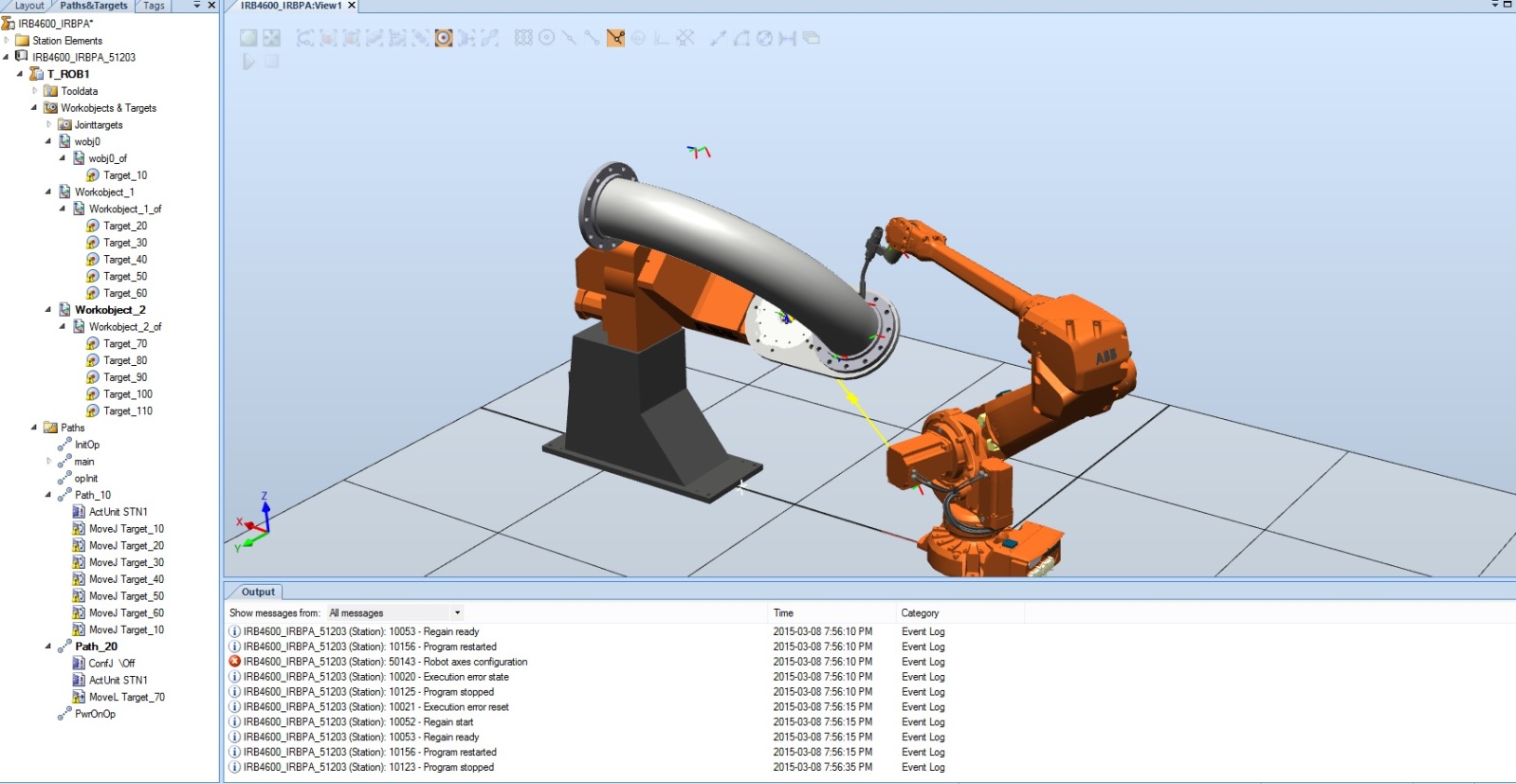
I am programming cell with 2DOF workpiece positioner and 6DOF robot in MoveIt! How many move_groups is better to do for synchro motions? One general move_group with 8 joints? Or may be two move_groups: 2DOF and 6DOF? Or may be move_group with two subgroups?
Something like that:
add a comment
