
Navigation stack - global plan goes straight through obstacles
Hi,
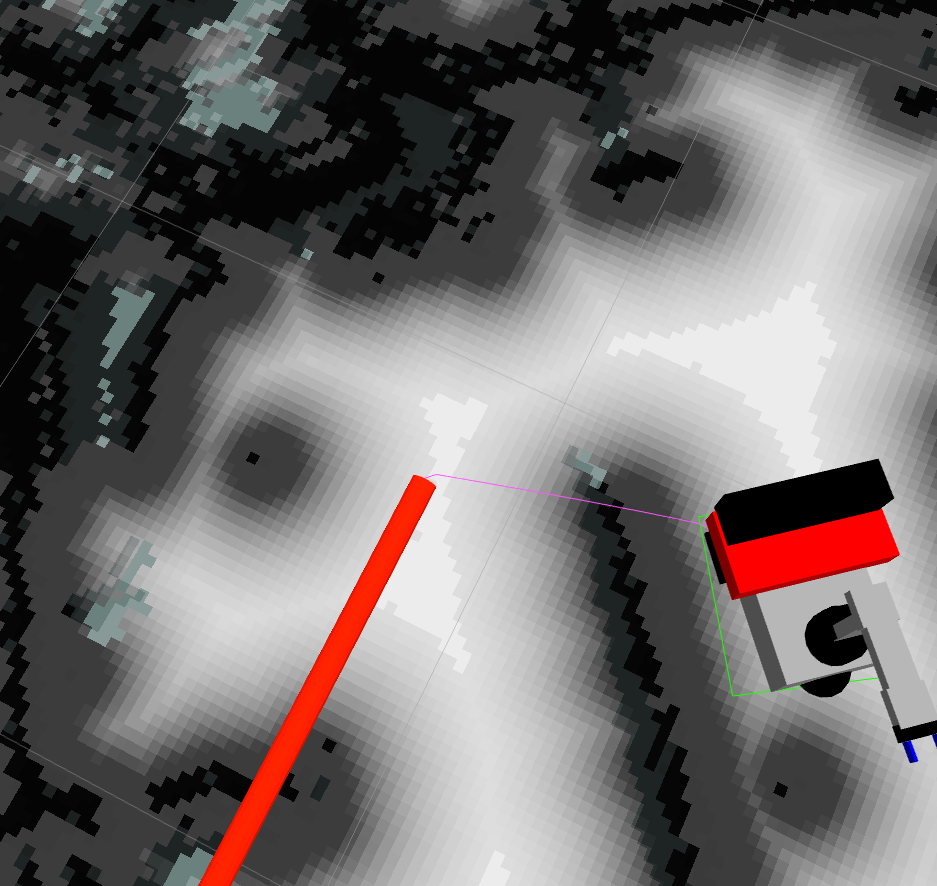
I'm attempting to use the Navigation stack to autonomously drive my robot. I have set it up according to the tutorials and tuning guides, but am experiencing a few issues. Most notably, it will occasionally plan routes straight through obstacles, even when there is a clearer path:
I was wondering what would be causing this, and what parameters I should be changing? I am using navfn for the global planner, but there doesn't seem to be too many parameters I can change:
http://wiki.ros.org/global_planner?di...
I would say bout 50% of the time it plans the route successfully, and 50% it does not.
Thanks for your help.
Edit:
My costmap configurations are as follows:
common_costmap.yaml:
obstacle_range: 2.5
raytrace_range: 3.0
footprint: [[-0.25, -0.1275], [-0.25, 0.1275], [0.06, 0.1275], [0.06, -0.1275]]
footprint_padding: 0.01
resolution: 0.01
robot_base_frame: base_footprint
update_frequency: 0.5
publish_frequency: 0.5
transform_tolerance: 1.0
#layer definitions
static:
map_topic: /map
subscribe_to_updates: true
inflation:
inflation_radius: 0.1
obstacles:
observation_sources: "/rtabmap/cloud_map"
"/rtabmap/cloud_map": {sensor_frame: /camera_depth_optical_frame, data_type: PointCloud2, topic: /rtabmap /cloud_map, marking: true, clearing: true}
global_costmap.yaml:
global_frame: map
rolling_window: false
track_unknown_space: false
plugins:
- {name: static, type: "costmap_2d::StaticLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
local_costmap.yaml:
global_frame: odom
rolling_window: true
plugins:
- {name: obstacles, type: "costmap_2d::ObstacleLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}


Can you share your costmap configurations? (Especially global costmap)
@Akif - I've updated my question to include these. Thanks.