
Will RTAB-MAP work without /tf topic ?
Hi I have some kinect bags that I'd like to try out with RTAB-MAP but they don't have a " /tf " topic. Will RTAB-MAP work without " /tf " topic ?
Based on the answer below. I tried to use a launch file to run the static_transform_publisher line but I don't seem to be getting a map. The launch file is based on rgbdslam_datasets.launch and 2.5 Kinect. The launch file is below:
<launch>
<!-- Eg from http://wiki.ros.org/rtabmap_ros/Tutorials/SetupOnYourRobot - Kinect & rgbdslam_datasets.launch -->
<!-- Choose visualization -->
<arg name="rviz" default="true" />
<arg name="rtabmapviz" default="false" />
<param name="use_sim_time" type="bool" value="True"/>
<!-- TF FRAMES -->
<node pkg="tf" type="static_transform_publisher" name="world_to_map"
args="0.0 0.0 0.0 0.0 0.0 0.0 /base_link /camera_link 100" />
<group ns="rtabmap">
<!-- Odometry -->
<node pkg="rtabmap_ros" type="rgbd_odometry" name="rgbd_odometry" output="screen">
<remap from="rgb/image" to="/camera/rgb/image_color"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<param name="frame_id" type="string" value="camera_link"/>
</node>
<!-- Visual SLAM -->
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<param name="frame_id" type="string" value="camera_link"/>
<param name="subscribe_depth" type="bool" value="true"/>
<remap from="odom" to="odom"/>
<remap from="rgb/image" to="/camera/rgb/image_color"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<param name="queue_size" type="int" value="10"/>
<!-- RTAB-Map's parameters -->
<param name="RGBD/AngularUpdate" type="string" value="0"/>
<param name="RGBD/LinearUpdate" type="string" value="0"/>
<param name="Rtabmap/TimeThr" type="string" value="700"/>
<param name="Mem/RehearsalSimilarity" type="string" value="0.45"/>
<param name="RGBD/OptimizeFromGraphEnd" type="string" value="true"/>
</node>
<!-- Visualisation -->
<node if="$(arg rtabmapviz)" pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" args="-d $(find rtabmap_ros)/launch/config/rgbd_gui.ini" output="screen">
<param name="subscribe_depth" type="bool" value="true"/>
<param name="subscribe_laserScan" type="bool" value="false"/>
<param name="subscribe_odom_info" type="bool" value="true"/>
<param name="queue_size" type="int" value="30"/>
<param name="frame_id" type="string" value="kinect"/>
<remap from="rgb/image" to="/camera/rgb/image_color"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<remap from="odom" to="odom"/>
</node>
</group>
<node if="$(arg rviz)" pkg="rviz" type="rviz" name="rviz" args="-d $(find rtabmap_ros)/launch/config/rgbdslam_datasets.rviz"/>
<node if="$(arg rviz)" pkg="nodelet" type="nodelet" name="points_xyzrgb" args="standalone rtabmap_ros/point_cloud_xyzrgb">
<remap from="rgb/image" to="/camera/rgb/image_color"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<remap from="cloud" to="voxel_cloud" />
<param name="queue_size" type="int" value="10"/>
<param name="decimation" type="double" value="4"/>
</node>
</launch>
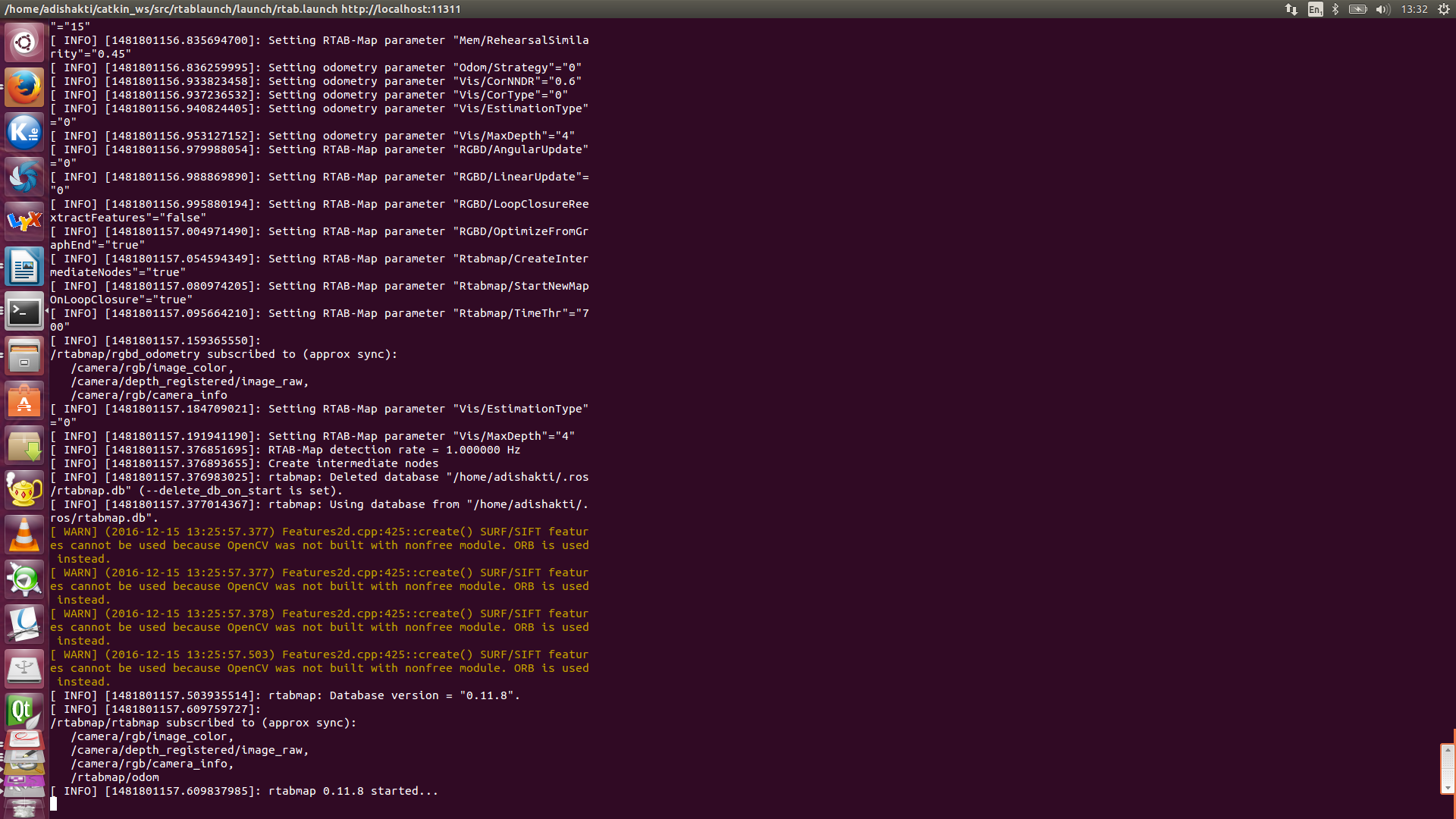
The output after launching the file is attached sum1.png sum2.png.
Rqt_graph is below.
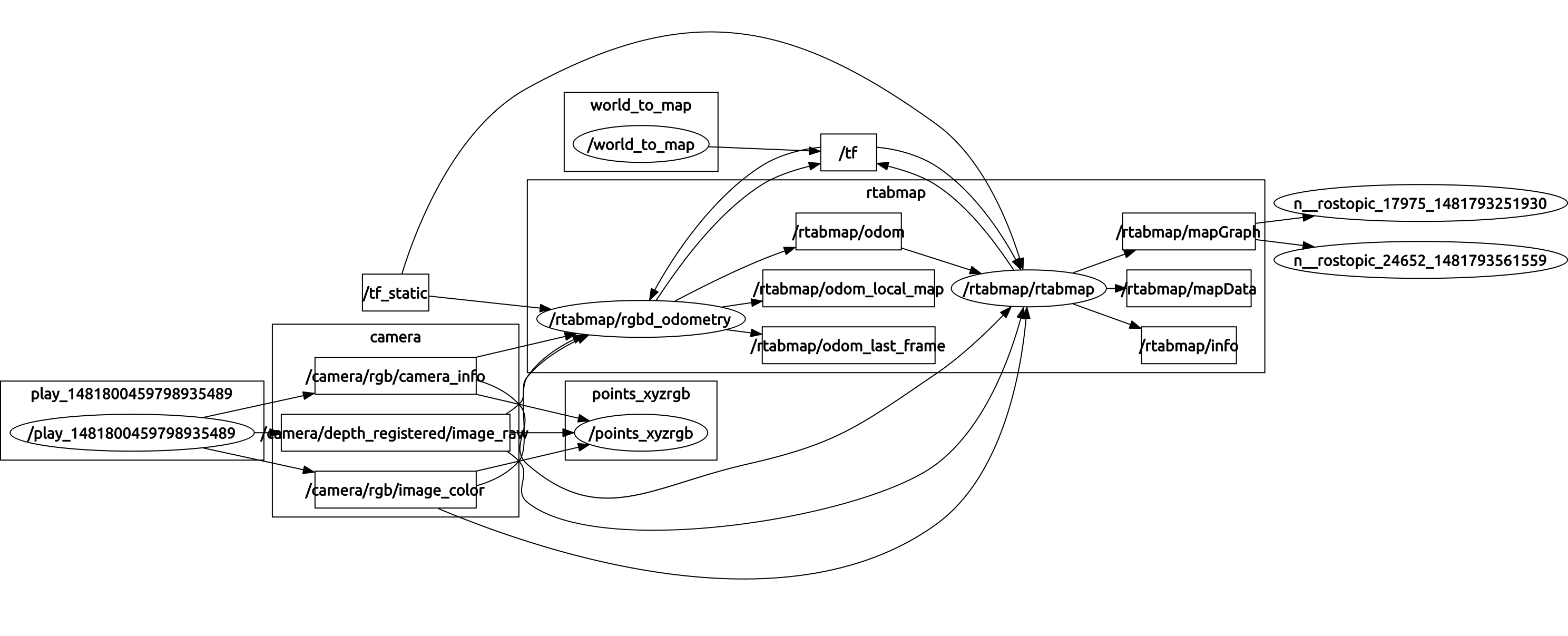
tf view_frames says "no tf data received"
In RVIZ I changed world in fixed frame to /camera_link. But still no map, only coordinate frame.
Sorry, not sure what I'm doing wrong here. Thank you
add a comment


{kind=link}
{kind=link}