
Connecting Moveit! to Gazebo simulator

Dear ros community,
I have a custom robot I'm simulating in Gazebo through ROS. Recently, I started to integrate it in Moveit! to exploit its motion planning capabilities. I have already successfully switched to trajectory controllers and set up everything using Moveit! online support.
The problem I'm facing right now is the following:
Briefly, when I click the plan and execute button (after having placed the robot in the desired pose through the RViZ gui) the simulated robot doesn't move and I get the following warning:
Dropping first 1 trajectory point(s) out of 10, as they occur before the current time. First valid point will be reached in 0.499s.
Is there something I am missing? Any workaround to solve this problem? Thanks in advance for your support!
edit 1:
I don't know if it is relevant but I have found out that my rqt_graph:
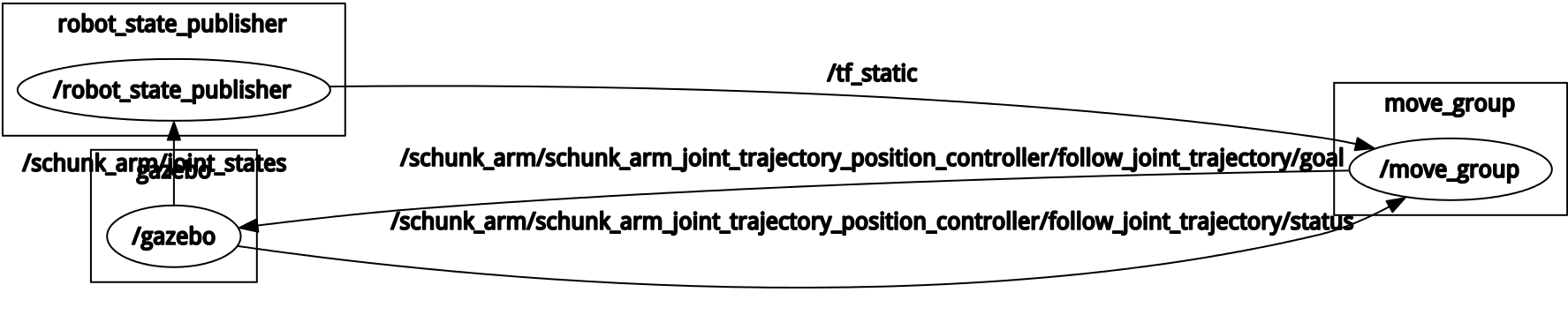
looks different from the one of this working package (which is also identical to the rqt_graph of the package suggested in the comments):

Is possible that I have a wrong configuration? My simulated robot still doesn't move!

Not sure which robot package you're using but maybe it's worth checking existing threads like this one.
Thanks for the answer. I am using simple_controller_manager package. Anyway my issue looks a bit different from the one you linked.
I've always used ROS control and basing my package off this one for MoveIt! with a simulated robot.
I also based my package on this, I have exactly the same configuration. Anyway my simulated robot still doesn't respond to any trajectory action I am sending from moveit!
The warning you are getting is fine. It has to do with the start time being slightly off (I always get it too).
Gazebo is not moving because MoveIt! is most likely publishing to an incorrect topic, my guess is in controllers.yaml.