
Extract odometry and map from .db file on Tango [closed]

Hi,
@matlabbe, I have saved a map on Tango with .db format. Now, I would like to get the odometry data from it. Is it possible?
Also, when I try to get the map in .pgm format like the one you described here, I get the following error:
[FATAL] (2016-07-04 10:00:06.287) util3d.cpp:252::cloudFromDepth() Condition (imageDepth.rows % decimation == 0) not met! [rows=90 decimation=4]
ERROR: service [/publish_map] responded with an error: [FATAL] (2016-07-04 10:00:06.287) util3d.cpp:252::cloudFromDepth() Condition (imageDepth.rows % decimation == 0) not met! [rows=90 decimation=4]
Do I have to change something?
Now, by changing cloud_decimation for the following map:
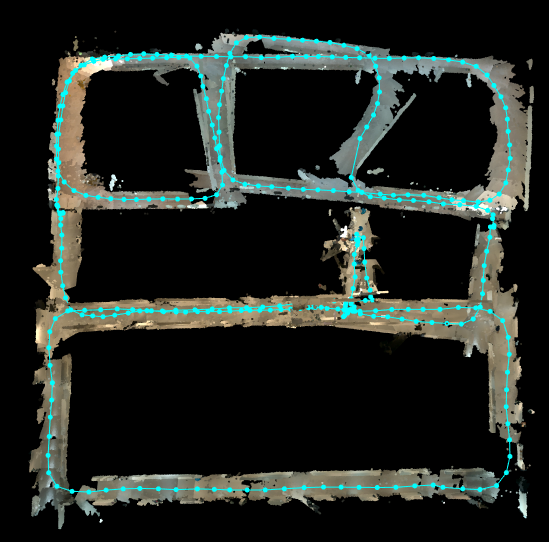
I can save the map, but the result looks like this:

It seems I am missing some data. Is it possible to improve it?
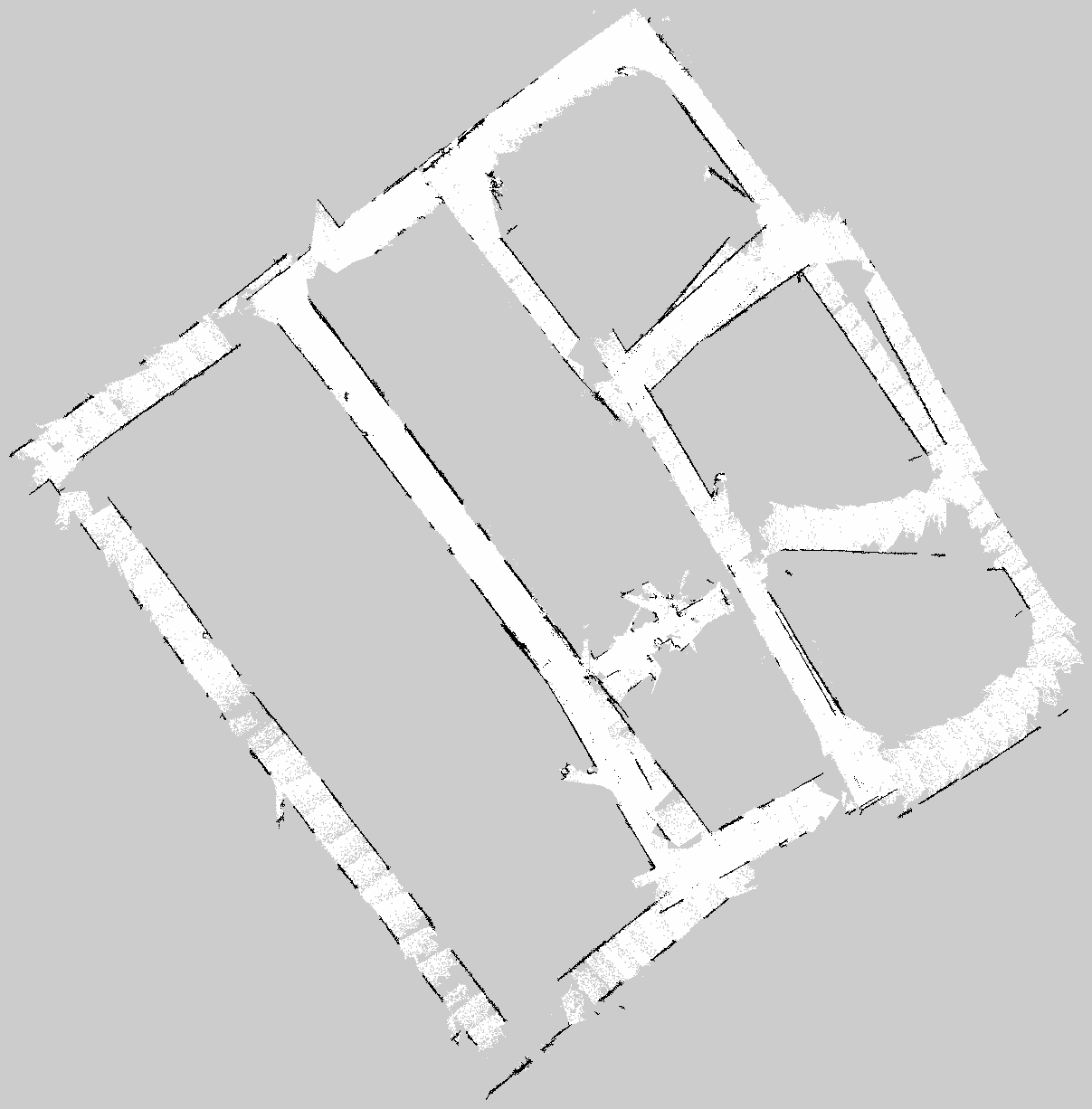
Update:
Now by using rosservice call /publish_map 1 1 0 I get the following map, I still miss some data.

Thank you.


If you are using
publish_mapservice, make sure you setglobalparam totrue:$ rosservice call /publish_map 1 1 0(second param is foroptimizedand last one forgraph only) to get the global map. I think what is shown in your grid map is the local map.Can you share the database? I just tried with a database created on Tango and I can get the full occupancy grid map.
Here is the database: https://www.dropbox.com/s/2jesjrrsgxi...