
footprint doesnt move in the costmap
Hello, for show obstacles in the map with only laser scanner i'm trying to do costmap_2d. when i move the laser, the footprint in the rviz doesnt move, it's always in its initial pose..is this normal? what can i do for make it move?
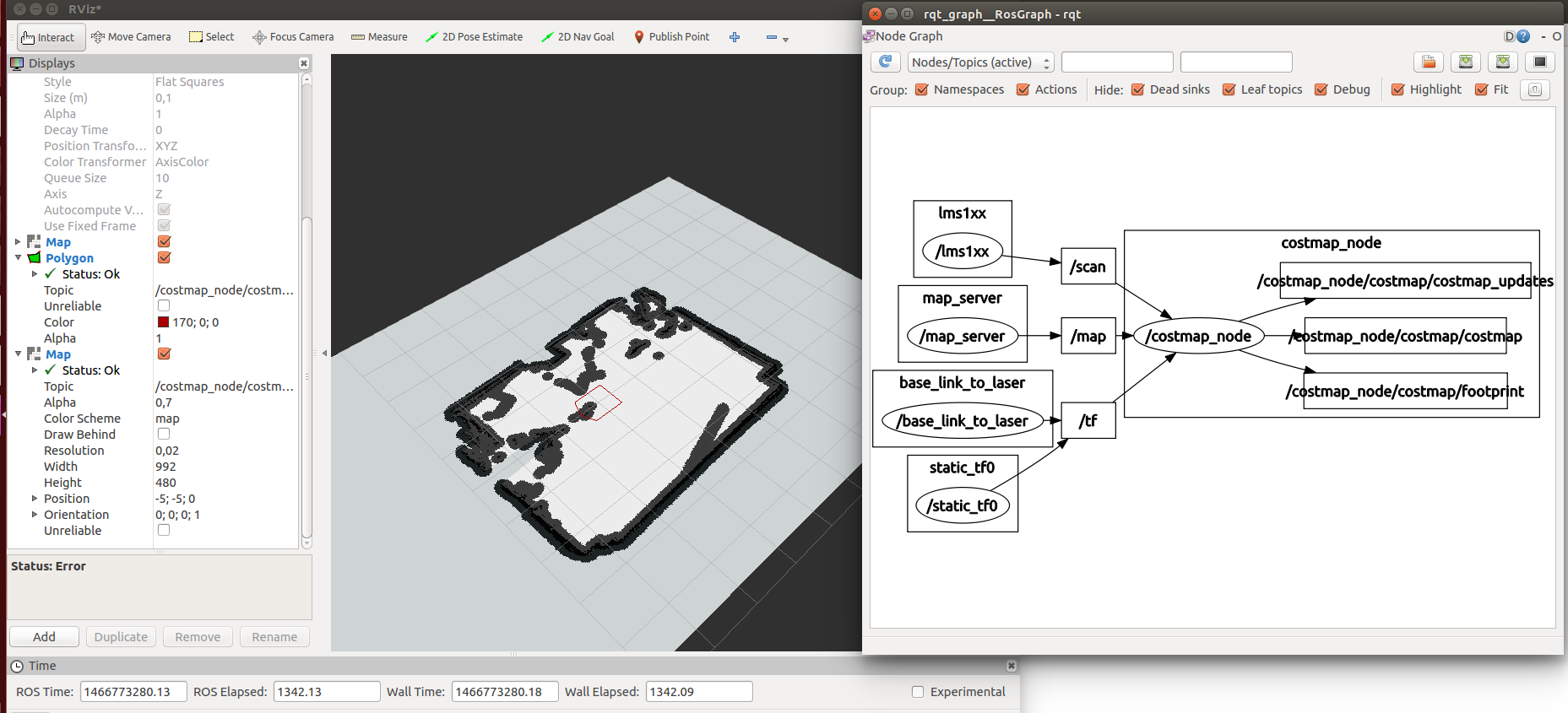
in rqt, when i choose Nodes/Topics (all) the footprint and costmap is corresponding each other, but when i choose Nodes/Topics (active) just see costmap to footprint (i'm sorry if i cant explain well)
my costmap launch file:
<launch>
#### connect to lms100 ###########################
<param name="/use_sim_time" value="false"/>
<node pkg="lms1xx" name="lms1xx" type="LMS1xx_node">
<param name="host" value="169.254.10.200" />
</node>
#### publish an example base_link -> laser transform ###########
<node pkg="tf" type="static_transform_publisher" name="base_link_to_laser"
args="0.0 0.0 0.0 0.0 0.0 0.0 /base_link /laser 40" />
<node name="static_tf0" pkg="tf" type="static_transform_publisher" args="2 0 0 0 0 0 /map /base_link 100"/>
<!-- Run the map server -->
<node name="map_server" pkg="map_server" type="map_server" args="$(find laser_scan_matcher)/launch/mymap.yaml"/>
<!-- Run the costmap node -->
<node name="costmap_node" pkg="costmap_2d" type="costmap_2d_node" >
<rosparam file="$(find laser_scan_matcher)/launch/mparams.yaml" command="load" ns="costmap" />
</node>
</launch>
my params.yaml file:
global_frame: /map
robot_base_frame: base_link
update_frequency: 5.0
publish_frequency: 1.0
static_map: true
#begin - COMMENT these lines if you set static_map to true
rolling_window: false
width: 6.0
height: 6.0
resolution: 0.025
#end - COMMENT these lines if you set static_map to true
transform_tolerance: 0.3
obstacle_range: 2.5
max_obstacle_height: 2.0
raytrace_range: 3
footprint: [[-0.325, -0.325], [-0.325, 0.325], [0.325, 0.325], [0.46, 0.0], [0.325, -0.325]]
#robot_radius: 0.46
footprint_padding: 0.01
inflation_radius: 0.1
cost_scaling_factor: 10.0
lethal_cost_threshold: 100
observation_sources: base_scan
base_scan: {data_type: LaserScan, sensor_frame: /laser, topic: /scan, expected_update_rate: 0.4,
observation_persistence: 0.0, marking: true, clearing: true, max_obstacle_height: 0.4, min_obstacle_height: 0}
add a comment
