
gmapping & laser_scan_matcher slow vs hector slam
Hi
I've been trying to get a reliable map from hector_slam and gmapping using an XTION Pro.
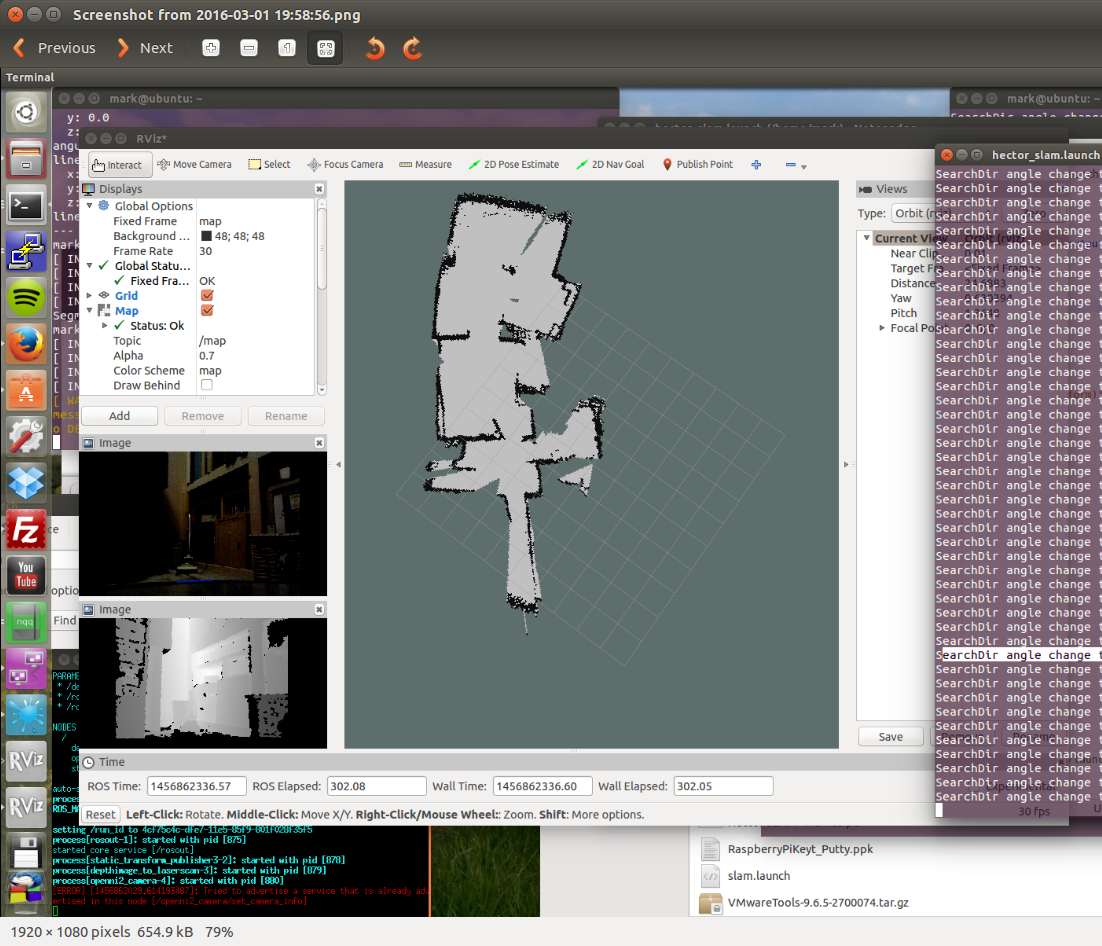
Hector_slam creates a very accurate map but because of the slow frame rate suffers if the robot turns quickly "angle change too large"
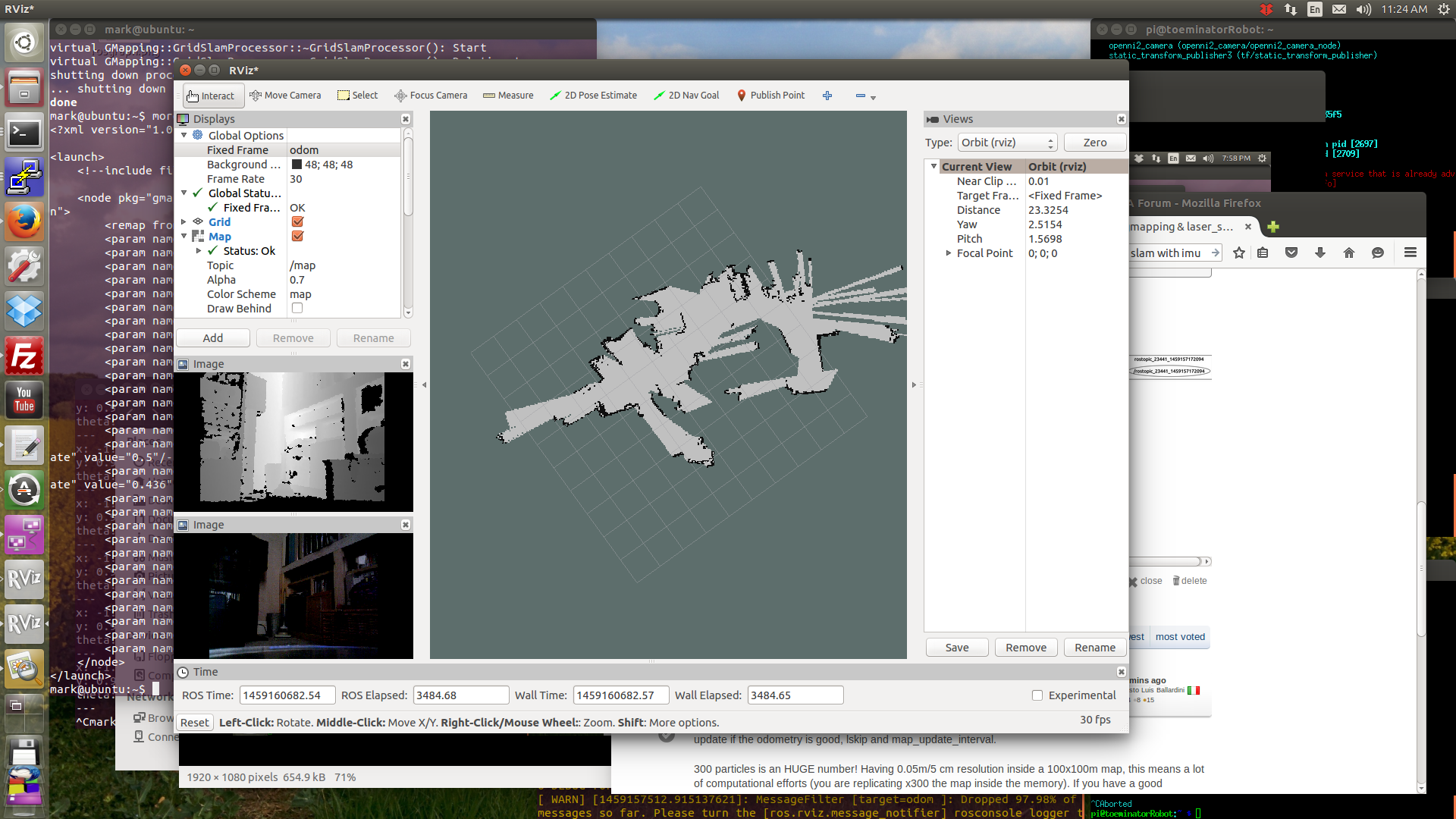
So I have then tried using gmapping fused with laser_scan_matcher. This produces a poor quality map and is very slow to update between 5-10 seconds.
gmapping launch config (Update 1):
<launch>
<!--include file="$(find ardros)/launch/ardros_configuration.launch"/-->
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="scre$
<remap from="scan" to="base_scan"/>
<param name="odom_frame" value="odom"/>
<param name="map_update_interval" value="1"/>
<param name="maxUrange" value="6.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.1"/>
<param name="astep" value="0.1"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
<param name="linearUpdate" value="0.05"/>
<param name="angularUpdate" value="0.1309"/>
<param name="temporalUpdate" value="-1.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="100"/>
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
<param name="delta" value="0.025"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
<param name="minimumScore" value="50"/>
<!--param name="throttle_scans" value="2"/-->
</node>
</launch>

Hector SLAM Map
Gmapping
Any suggestion re: what can I do to improve the results?
Thanks
Mark
add a comment

