
Wrong dimensions in map obtained using GMapping?
Hi all,
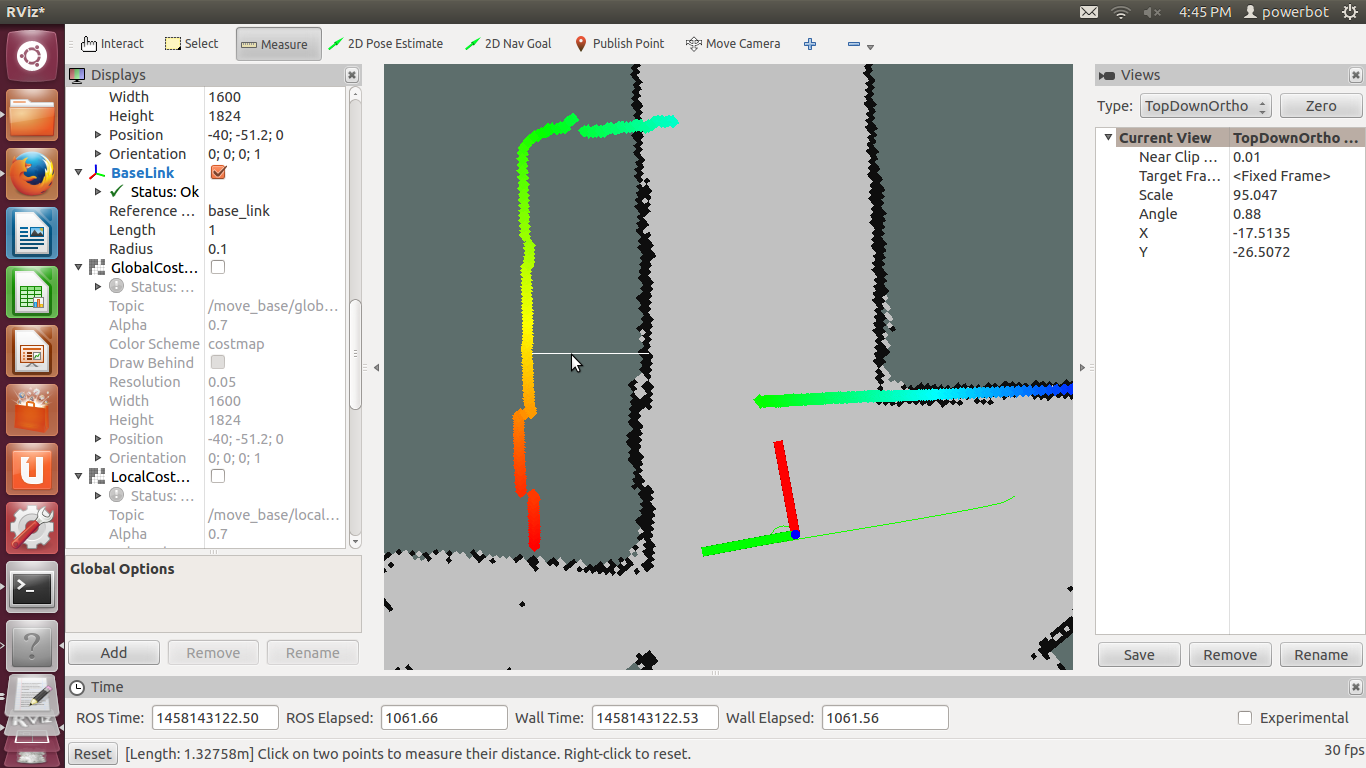
I have a map which I obtained using GMapping and now I am using it for navigation. The robot gets lost when the laser scan particles do not fall directly on the same wall on the map. In the image shown there is a difference of 1.32m between the actual wall and the wall on the map. The dimensions of the map do not always match reality. Sometimes there are discrepancies of around 1m between the dimensions shown on the map and reality. Does anyone have any ideas why this is happening?
Thanks.

@DanThe, do you mean that the entire map looks reduced or enlarged ? If so, you can double check that the 'delta' parameter of your gmapping configuration is the same as the 'resolution' parameter in the .yaml file in the same folder as your map
Thanks for your reply. It is not the entire map that is reduced or enlarged but only some parts of it. There are parts of the map where the dimensions are accurate and there are parts of the map where the dimensions differ by around 1m. This is hindering the navigation of the robot.
gmapping is good but not perfect. In my experience, the number one reason for bad maps is a poor odometry. I suggest you do the rviz test described in the Odometry section here : http://wiki.ros.org/navigation/Tutori...