
Using two kinects
Hi,
I'm using ROS indigo with two kinects. I have configued openni_camera and the launch file of using two kinects.
However, different from the feasible usage example above, I met problems when launching the multi_kinect launch file. The three files I used: (file1, file2, file3) are the same with those in the link.
The problem:
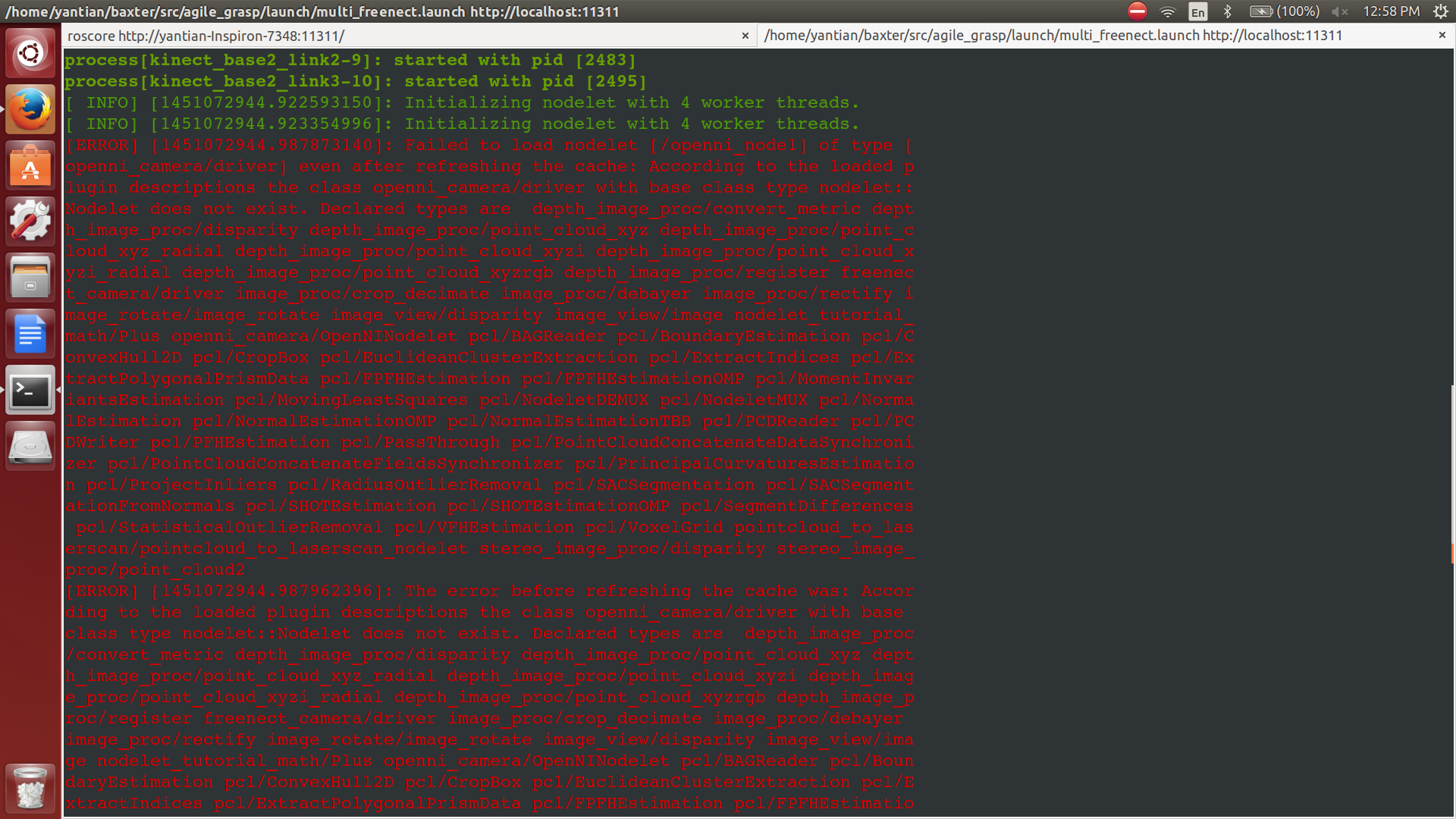
But I can roslaunch each of the Kinect with freenect.launch.
Thanks very much!

Are you using Openni or freenect to launch. I never had any luck with openni, make sure you are 2 different usb bus also you error report is to hard to read just copy the text and use the format options