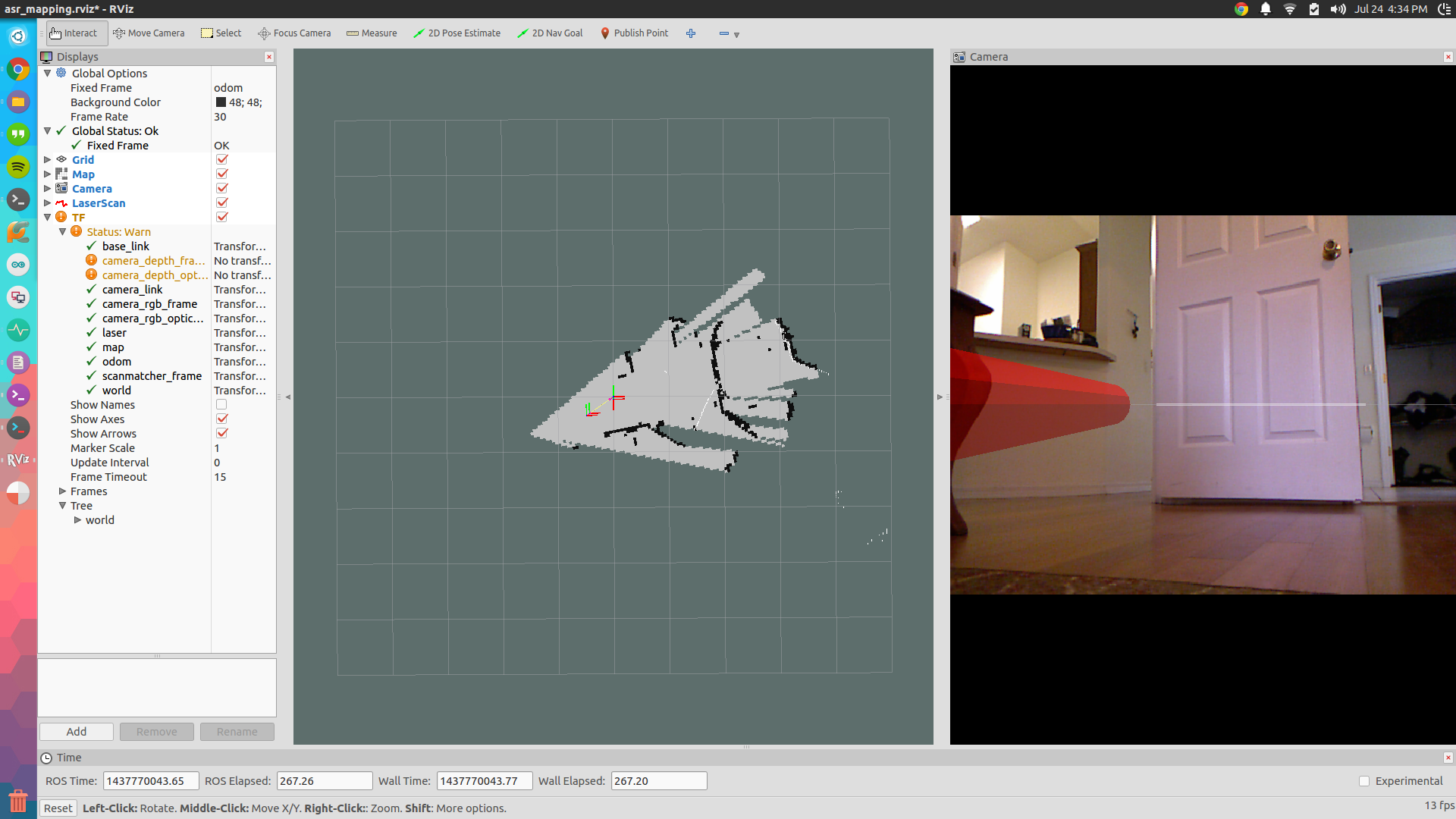
Map is only being created in one direction
I have a two-wheeled differential robot with encoders, and a Kinect and I'm trying to build a map with gmapping. I'm converting the point cloud to a laser scan with depth_image_to_laserscan, and using ros_arduino_bridge to publish odometry and receive cmd_vel messages. The issue I'm having is that when it seems like my scans are locked into one direction. When I map, I'm constantly overwriting the same spot in a cone in front of my robot. When I drive the robot forward I don't see it's position on the map change, I only see the scan shifting out of place.
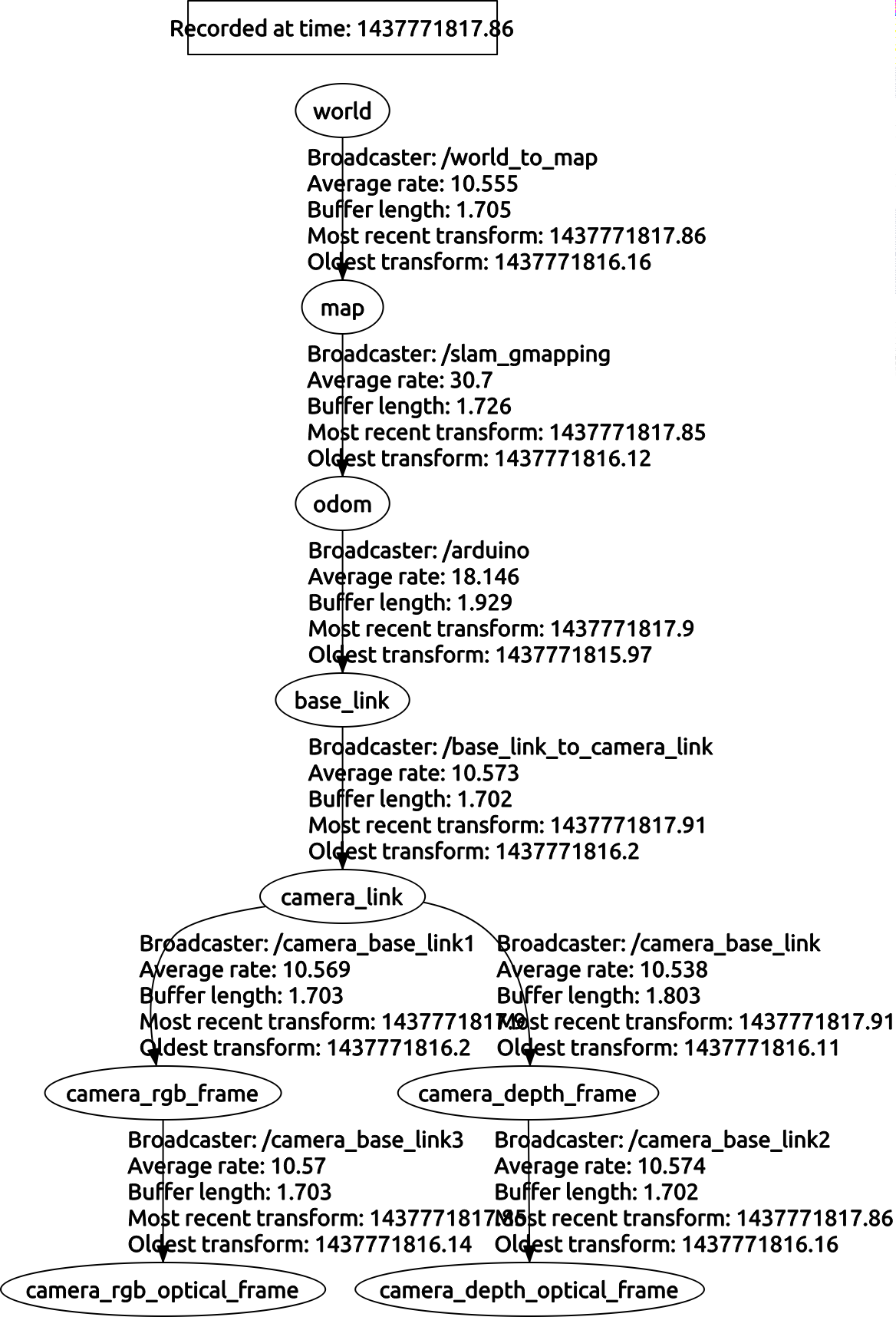
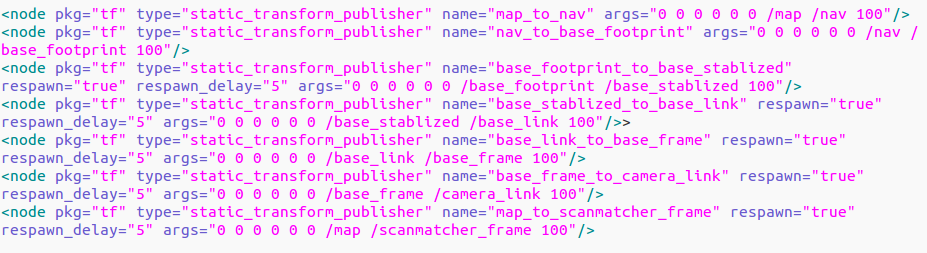
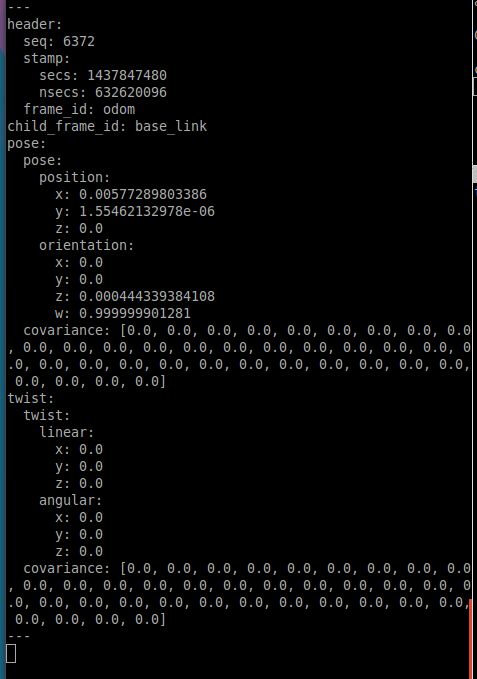
I've verified that I'm getting odometry with rostopic echo /odom. I've tried various TF configurations, and I still don't know what the issue is. I've been successful with HectorSLAM using no odometry, but I'd really like to see how gmapping compares in performance. I've supplied an image of the overwritten map, my and my TF configuration. Please let me know if there's anything else I can provide.