
Long path goals
Hello,
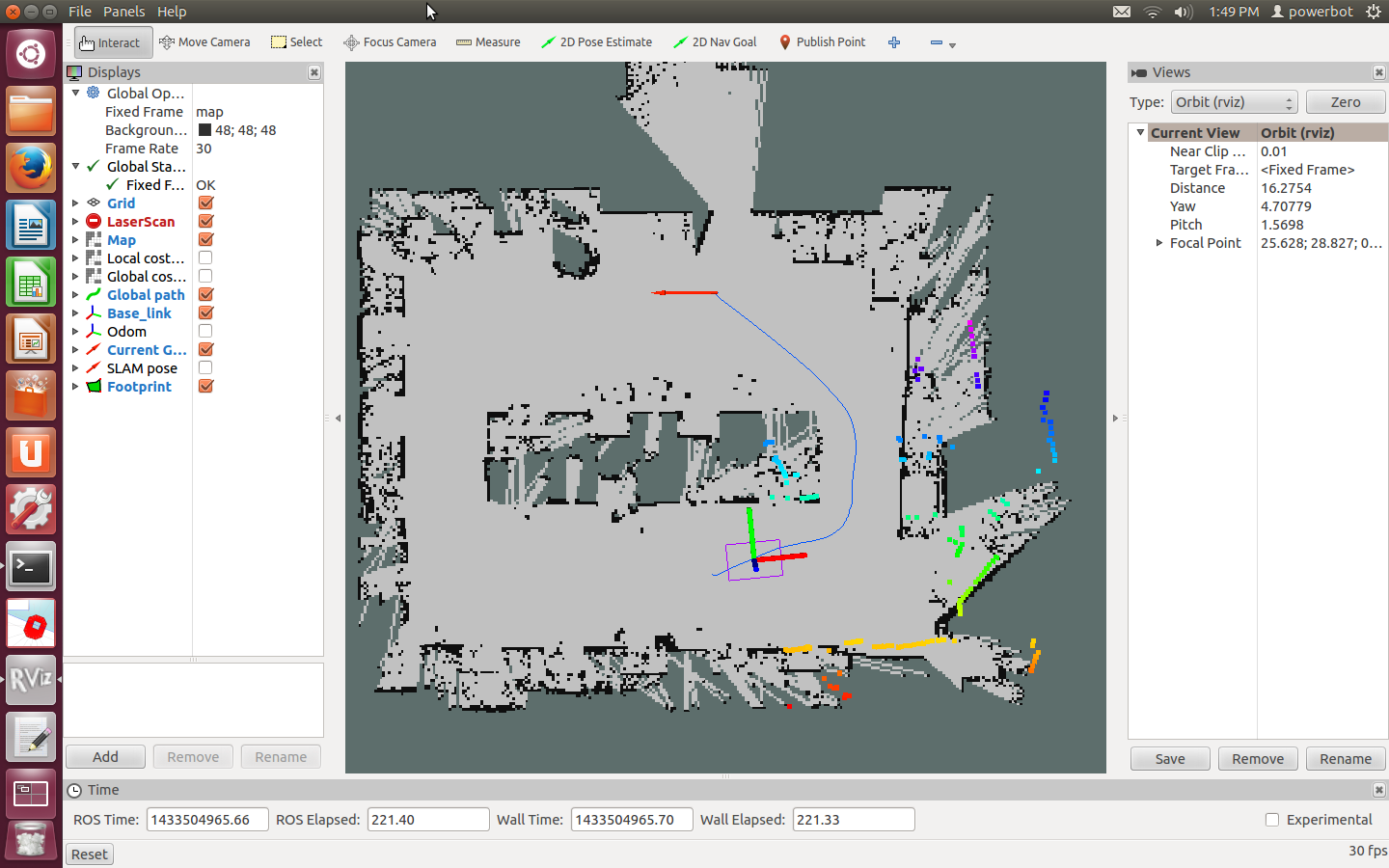
I have a peculiar situation with move_base. I have obtained a map of our lab and I am currently trying to navigate in it. Most of the time, move_base works without problems and short path goals are reached. However I have a peculiar case where I give the robot a goal that is on the other side of a set of obstacles (desks in the middle of the room as you can see from the map). The global path planner plans a perfect path to this goal without any problems, however when the robot attempts to navigate towards it by following this global path, it will simply rotate on its own axis and never attempts to move towards the goal. This is as far as it got towards reaching the goal before it started rotating on its own axis:
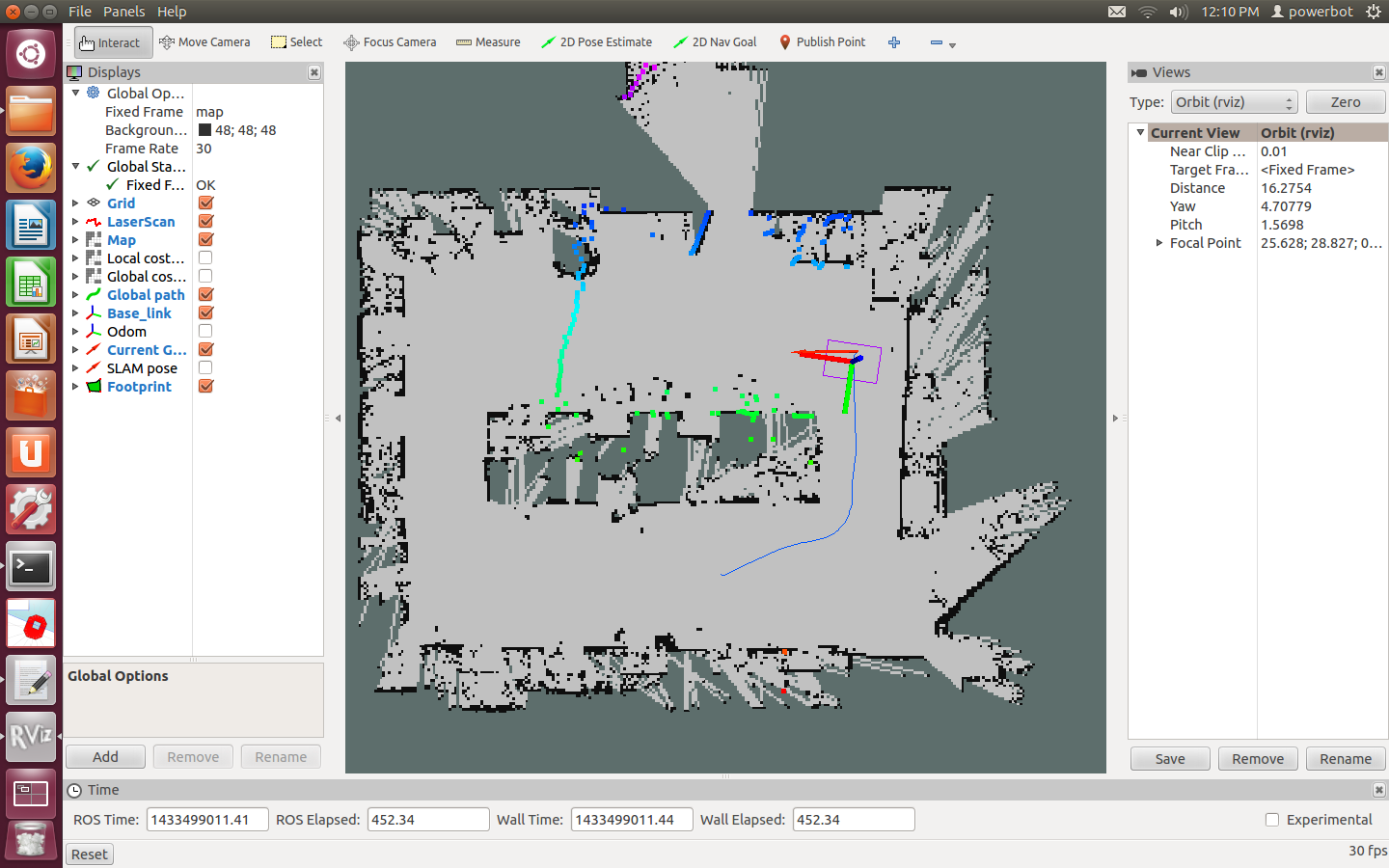
What is weird about this is that if this goal is segmented into two successive and shorter goals, the robot has no problem in navigating towards them and reaches them perfectly as shown below:
Does this have to do with the way that the Trajectory Rollout local planner is forward simulating the possible trajectories? If so, which is the parameter that most probably would need some tuning?
-- UPDATE -- Here's my navigation config:
common_costmap_params.yaml:
map_type: costmap
transform_tolerance: 0.7
obstacle_range: 2.5
raytrace_range: 3.0
footprint: [[-0.5, -0.33], [-0.5, 0.33], [0.5, 0.33], [0.5, -0.33]]
inflation_radius: 0.6
observation_sources: laser_scan_sensor
laser_scan_sensor: {sensor_frame: laser,
data_type: LaserScan,
topic: /scan,
marking: true,
clearing: true,
inf_is_valid: true}
global_costmap_params.yaml:
global_costmap:
global_frame: /map
robot_base_frame: base_link
update_frequency: 3.0
publish_frequency: 10.0
static_map: true
width: 30.0
height: 30.0
resolution: 0.05
origin_x: 0.0
origin_y: 0.0
plugins:
- {name: static, type: "costmap_2d::StaticLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
local_costmap_params.yaml:
local_costmap:
global_frame: /odom
robot_base_frame: base_link
update_frequency: 3.0
publish_frequency: 10.0
static_map: false
rolling_window: true
width: 10.0
height: 10.0
resolution: 0.05
origin_x: 0.0
origin_y: 0.0
plugins:
- {name: obstacles_laser, type: "costmap_2d::ObstacleLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
base_local_planner.yaml:
TrajectoryPlannerROS:
# Robot Configuration Parameters
acc_lim_x: 0.2
acc_lim_y: 0.2
acc_lim_theta: 0.1
max_vel_x: 0.7
min_vel_x: 0.05
escape_vel: -0.1
holonomic_robot: true
# Goal Tolerance Parameters
xy_goal_tolerance: 0.3
yaw_goal_tolerance: 0.3
latch_xy_goal_tolerance: false
# Forward Simulation Parameters
sim_time: 2.0
sim_granularity: 0.025
vx_samples: 5
vtheta_samples: 20
# Trajectory Scoring Parameters
meter_scoring: true
pdist_scale: 0.6
gdist_scale: 0.8
occdist_scale: 0.01
heading_lookahead: 0.325
heading_scoring: false
dwa: false
global_frame_id: odom
# Oscillation Prevention Parameters
oscillation_reset_dist: 0.05
This is the move_base launch file:
<launch>
<master auto="start"/>
<arg name="no_static_map" default="false"/>
<arg name="base_global_planner" default="navfn/NavfnROS"/>
<!-- <arg name="base_global_planner" default="carrot_planner/CarrotPlanner"/> -->
<arg name="base_local_planner" default="base_local_planner/TrajectoryPlannerROS"/>
<!--<arg name="base_local_planner" default="dwa_local_planner/DWAPlannerROS"/> -->
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="/home/powerbot67/navigation_powerbot/src/powerbot_2dnav/config/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="/home/powerbot67/navigation_powerbot/src/powerbot_2dnav/config/costmap_common_params.yaml" command="load ...
In your screenshot of the failed attempt the laserscan topic is showing an error - is it not working even when laserscan ia happy ?
The error is due to the fact that i stopped the motor controller "rosaria" so that the robot stops rotating to give me chance to capture the screenshot. Sorry about that. Otherwise I don't get any others from laser, move_base, etc.
Please post your nav configuration.
@David Lu I have updated my question with the config. I noticed that when I increased the sim_time parameter to a very large value (10.0) while keeping the sim_granularity default, I got better performance in that goals that were not reached as explained above, were suddenly reached. Why is that?
Do you see better behavior when you use DWAPlannerROS?
No, actually behaviour is much worse with DWAPlannerROS. I find it funny because it's supposed to be more efficient but I cannot get the vehicle to reach certain goals with DWA planner. The parameters I'm setting for it are similar to those of Trajectory Rollout.