
How to improve terrible stereo_image_proc quality
Are there any other documented techniques for improving the quality of the disparity image generated by stereo_image_proc aside from what's documented in the wiki?
Following the tutorial, I spent several hours tweaking the parameters, but I found it nearly impossible to get any kind of decent quality. Any kind of surface with uniform texture either appeared as flat gray or as a constantly changing jumble of colors. Objects with a distinct texture came out the best, but even they were still barely recognizable.

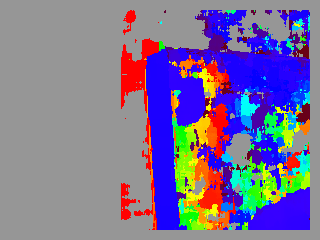
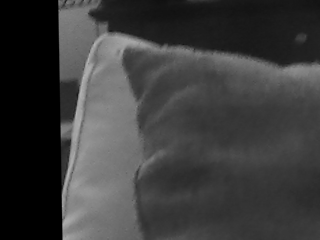
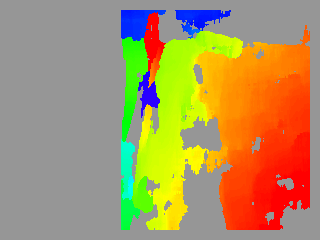
Is this the best quality I should reasonably expect from a stereo camera using cheap USB webcams, or is there any way I can improve the quality?


stereo vision has a history of having trouble with untextured surfaces.