
problem with fovis

Hi guys
I tried to run fovis fovis_mono_depth_odometer then I used freenect_camera to get data from my kinect
I wrote this launch file for that:
<launch>
<remap from="/camera/rgb/image_rect" to="/rgb/image_raw"/>
<remap from="/camera/rgb/camera_info" to="/rgb/camera_info"/>
<remap from="/camera/depth_registered/image_rect" to="/depth_registered/image_raw"/>
<remap from="/camera/depth_registered/camera_info" to="/depth_registered/camera_info"/>
<node
pkg="fovis_ros"
type="fovis_mono_depth_odometer"
name="fovis"
output="screen"
/>
<node
pkg="freenect_camera"
type="freenect_node"
name="Driver"
output="screen"
/>
</launch>
But I got this err:
This is graph of my nodes
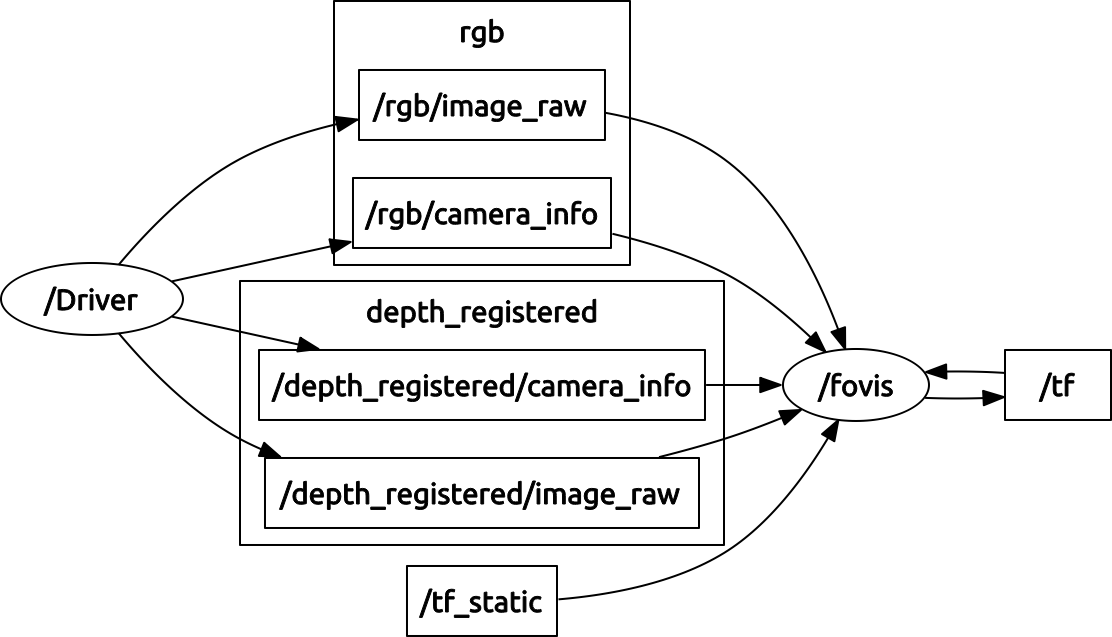
and fovis didn't work.
any suggestion about my problem?
Thanks
Hamid
add a comment
