
Turtlebot soft-reboot issue and no output in rviz

I am trying to use the turtlebot packages for a slam application. Till now I managed to move around my iRobot Create so I thought of moving to the Kinect part.
I have the Kinect setup. I run the command related to image_view and I get the results.
When I tried to run the 3dsensor.launch file, rviz doesn't show any output from the kinect.
Also, when I connect the kinect I get the following problems -
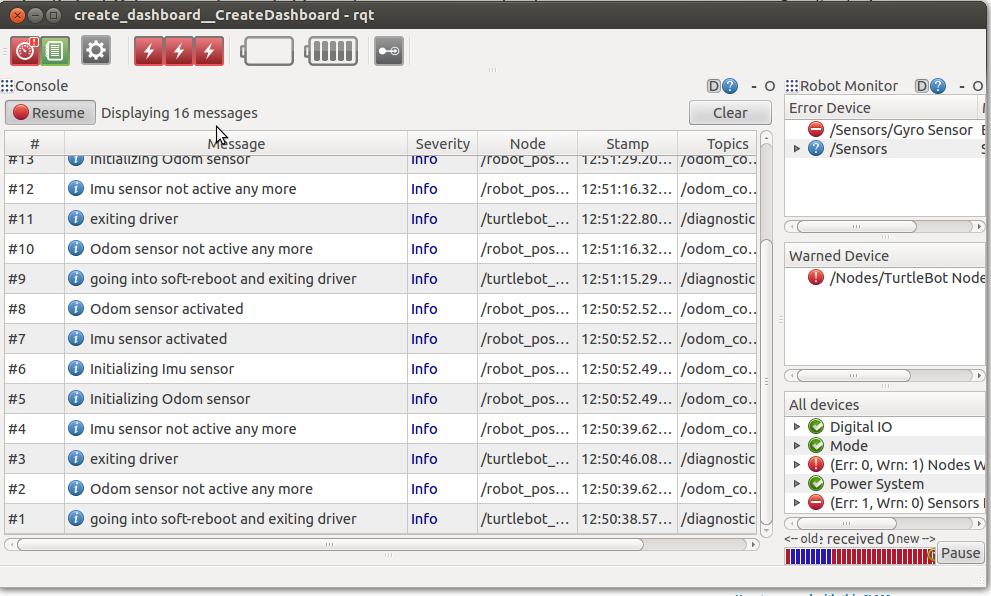
- The Create beeps after every few seconds. Plus the dashboard keeps popping up the message that it is soft rebooting in passive mode. I don't know why this is happening all of a sudden. It didn't have any such problem before even though rviz didn't show any output.
- The turtlebot_teleop doesn't work after this beeping noise starts. I tried this when rviz didn't give a result. I thought maybe using teleop to move the robot around might make some difference.
This is the image of the dashboard when I just run roscore and minimal.launch with kinect plugged in -
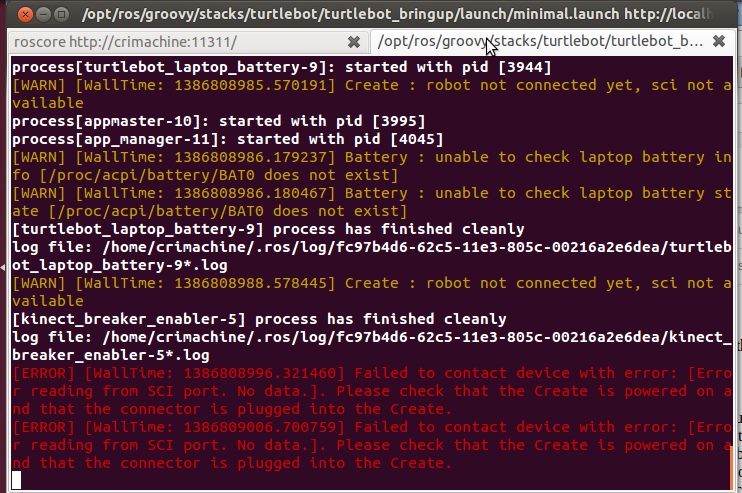
And now, after I left it untouched for a few hours and I try again, I get these errors when I run just minimal.launch
Can anyone tell me what the issue is here and how to resolve this?
add a comment
